class Body {
public:
Body();
~Body(){}
PostureData indicate; //指示値
PostureData real; //実際値 ←実際値はセンサー値を適用して姿勢・重心点を計算する。
//更新タイミングがあるので常に正しいとは限らない。測定フレームナンバー、要求、回答などの仕組みが必要か。
int SetPos(LegPos legs[]);
int SetPos(LegData legs[]);
void SetAngle(LegData legs[]);
void SetPosture(Posture &p);
int SetTargetPos(LegPos legs[]);
void SetTargetAngle(LegData legs[]);
void SetTargetPosture(Posture &p);
void SetTargetPosture(PoseType);
void SetMode(MovingMode m);
void SetMotionMode(MotionMode m);
void SetSpeed(double s[]);
void SetSpeed(double s);
void SetFrame(double f);
void SetMotionData(MotionData*);
void SetKeyData();
void SetWalkParam(WalkParam*);
void SetWpSp(WalkParam*);
void SetRefLeg(int, int, int, int);
void SetRefLeg(int r[]);
void SetPhi(double);
void PrintMotionData(char*);
bool CheckTarget();
MovingResult Next();
MovingResult NextMotion();
MovingResult NextWalk();
MovingResult NextPosture();
MovingResult NextAdjust();
MovingMode GetMode();
void SetStop();
void ResetStop();
bool SetPose(PoseType); //modeがmmPoseならPoseType登録。
void Von();
void Voff();
void Vtoggle();
bool GetV();
ResultType GetRT(); //歩の切れ目、モーションの切れ目を知る。
void SetWalkStyleCmpLevel(int lvl);
private:
void SetInitMotionAxis();
void SetInitMotionAngle();
void SetInitMotionPosture();
int NextMotionAxis();
int NextMotionAngle();
int NextMotionPosture();
void SetInitWalk(WalkParam &_wp);
void SetInitChangePosture();
void SetInitAdjustDir();
bool WalkStyleCheck(int lvl); //現在姿勢が歩行姿勢かどうかをチェック。事前にSetInitWalk()
void CalcWalk(const double rad, Posture &p);
int CalcWalk(const double rad);
Posture RevCalcWalkStyle(double rad); //現姿勢をradの歩行状態とするPostureを返す。
void MakeWalkParamFromPos(Posture p, WalkParam &w); //wpとpをマージしてshiftWpを作成。
void CalcShiftPosWalk(const double rad, Posture &p, const WalkParam &w); //姿勢移行歩行 radの歩行姿勢pを返す。
int CalcSwPos(double rad);
void CalcSwPos(double rad, Posture &ps);
double CheckSwPos();
bool CheckStance();
int CalcAdjust(const double radian);
double StepLegFunc(double rad, int leg, const WalkParam &rw);
double HungLegFunc(double rad, int leg, const WalkParam &rw);
double SwPosFunc(double rad, int leg, const WalkParam &rw, double sp = 0);
double HungLegFunc2(double rad, int leg);
double Xsign(int a, int b);
double Ysign(int a, int b);
int Xreverse(int leg);
int Yreverse(int leg);
//general
MovingMode mode;
list<PoseType> pose;
bool stop;
bool gain; //未実装
//common
bool first;
Posture startPosture; //姿勢モーション・姿勢移行で使用
Posture subPosture; //姿勢モーション・姿勢移行で使用
//motion
MotionData* md; //現状のモーションデータへのポインタ //歩行で言うik.wpに相当する?モーションデータはikクラスで管理した方がよいか?
vector<KeyData>::iterator itev; //現状のキーフレームを示す。//listでも良かったかも。
MotionMode motionMode;
PostureData target;
double speed[4]; //足毎の速度
double legframes[4]; //足毎の必要フレーム数
LegPos uvector[4]; //1フレームで移動する座標量
LegAngle uangle[4]; //1フレームで移動する角度量
double frames; //完了までのフレーム数
//walk
WalkParam wp; //歩行パラメータセット
WalkParam shiftWp; //姿勢移行歩行用パラメータセット
int wsc_cmp_lvl; //歩行姿勢の照合レベル 0が厳しい。大きいほど緩い
double sp; //歩行開始位相
double pc; //歩行済歩数
double spd;
double accel;
double width; //wp.thita2を考慮した左右足幅
double base; //wp.thita1を考慮した前後足間隔
double radius[4]; //各足の中心からの距離
double base_angle[4]; //各足のニュートラル位置角度
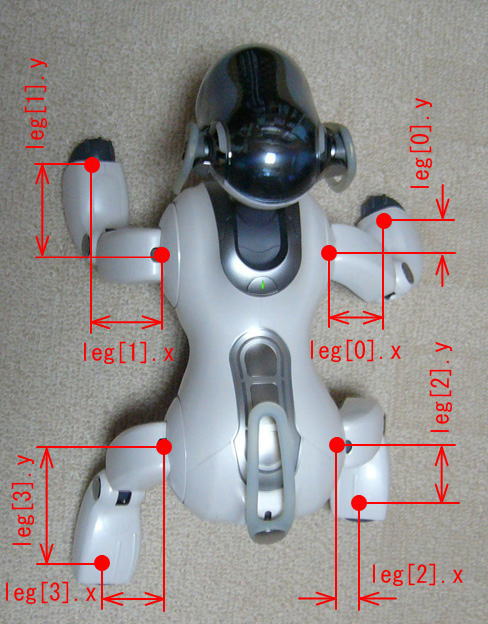
double w[4]; //aibo原点から見た各足の座標(x)
double b[4]; //aibo原点から見た各足の座標(y)
//posture
WalkParam wpSp; //姿勢変更用歩行パラメータセット
bool inertiaSwPos; //姿勢移行用 慣性フラグ(第一足を上げる場合に慣性をつけるため、0.5サイクル増しにするかどうか)
int refLeg[4]; //姿勢移行時の基準足 1:基準 0:基準に非ず
Posture offsetSwPos; //姿勢移行用 オフセット移行量
Posture stanceSwPos; //姿勢移行用 スタンス移行量
double defaultSwPosPdTable[4]; //姿勢移行用 位相テーブル
double defaultSwPosXdir;
double defaultSwPosYdir;
//adjust
double phi; //角度微調整用 回転角度指定
double radBorder; //この値より回転半径が小さい足は基準足とする。
double offsetSA[4]; //角度微調整用 送り足動作における初期位置差分 offsetSA=offsetStartAngle
//
ResultType rt; //毎歩ごとにtrueに。読み出すとリセットされる。
bool v; //メッセージスイッチ
};
|