 丂揤壓乮抧壓偩偗偳乯偺墲棃偵偟傖偑傒崬傫偱偟傖傋傝偙傓偍偠偝傫偨偪丅丂蛋矌q嫙偑尒偰傞傛偋乣丅
丂揤壓乮抧壓偩偗偳乯偺墲棃偵偟傖偑傒崬傫偱偟傖傋傝偙傓偍偠偝傫偨偪丅丂蛋矌q嫙偑尒偰傞傛偋乣丅仭俋寧侾擔仭
崱擔偼抶傟偽偣側偑傜壞媥傒丅
壞応偺岲偒側偲偙傠乮偲偄偭偰傕巇帠偺搒崌桪愭側偺偼摉偨傝慜偩偗偳乯偵擇擔媥傒傪傕傜偊傞僔僗僥儉偵側偭偰偄傞偺偩偗傟偳丄偙偙傫偲偙朲偟偐偭偨忋偵崱擭偼婣徣偟側偐偭偨偺偱媥傒傪庢傟偢偵偍傝傑偟偨丅丂偄偄壛尭偵媥傒傪庢傜側偒傖偟偐傜傟傞偺偱丄崱擔偼梊掕傪擖傟側偄傛偆偵挷惍偟偰傑偢偼侾擔栚偺媥傒傪傕傜偊傞偙偲偵側傝傑偟偨丅
偣偭偐偔偺俁楢媥側偺偩偗偳丄嬥梛擔偼戝嶃弌挘偱偦偺傑傑幚壠偵攽傑偭偨偐傜儘儃僢僩揑偵偼晛捠偺俀楢媥丅
嶐擔偼僙儞僒乕儃乕僪偺嵶偐側偲偙傠傪巇忋偘偨偺偱丄崱擔偼儔儉僟偺儊僀儞僾儘僌儔儉偺惍棟傪丅
俀儢寧傕庤傪擖傟偰側偐偭偨偟丄偦偺俀儢寧慜傕敪嶶婥枴偩偭偨偺偱丄暅廗偺堄枴傕崬傔偰僐乕僪偺惍棟傪偟傑偟偨丅丂僥僗僩僐乕僪傪惉挿偝偣偰偄偭偰偦偺傑傑僀儞僾儕偵偟偪傖偆偲偄偆奐敪曽朄側偺偱婰弎曽朄偑偽傜偽傜偩偭偨傝丄屆偄婰弎偑巆偭偰偄偨傝偡傞偺偱晄梫偵側偭偨晹暘偼偽偭偝傝嶍彍丄婰弎傪弌棃傞偩偗摑堦偡傞丅
偁丄偱傕晄梫婰弎傪嶍彍偡傞慜偵堦墳僶僢僋傾僢僾傪庢偭偰偍偄偨曽偑偄偄偐側偲巚偭偨偺偑塣偺偮偒丅
奜晅偗偺USB僴乕僪僨傿僗僋偵僶僢僋傾僢僾僣乕儖偱僶僢僋傾僢僾偟偰偄傞偺偱偡偑丄嵟嬤側傫偐挷巕偑埆偔偰偁傫傑傝僶僢僋傾僢僾偟偰偄側偄丅崱擔傕傗偭傁傝偍偐偟偄偲巚偆偔傜偄抶偄偺偱怓乆偲挷傋偰傒傑偟偨丅
乽抶墑彂偒崬傒偱僨乕僞偑幐傢傟偨偐傕抦傟側偄乿偲偄偆嫲傠偟偄儊僢僙乕僕偑弌傞偺偱僌僌偭偰傒傞偲傾儞僠僂傿儖僗僜僼僩偑廳偄偐傜偲偐丄僉儍僢僔儏偑偁傆傟傞偲偐偁傞偺偩偗偳丄儅僀僋儘僜僼僩偺僒億乕僩儁乕僕偱偙偆偄偆偺傪尒偮偗傑偟偨丅丂廋惓僷僢僠傕弌偰傞偟丄偙傟偑價儞僑偩傠偆偲巚偭偰僀儞僗僩乕儖偟偨傫偩偗偳丄傗偭傁傝僟儊丅
寢嬊僷僢僠偼奜偟傑偟偨丅丂僶僢僋傾僢僾偼儔儉僟偺僜乕僗僐乕僪偼僶僢僋傾僢僾偟偰丄偦偺懠偺僪僉儏儊儞僩椶偼傑偩僶僢僋傾僢僾偱偒偰側偄丅偟偐偟丄僼傽僀儖偑僐僺乕偱偒側偄OS偭偰巊偊側偄偱偡偹丅
敿擔柍懯偵夁偛偟傑偟偨丅偦偺忋僀儔僀儔偝偣傜傟偨偟丅
丂
儔儉僟偼偞偭偔傝偲僜乕僗偺惍棟偑廔傢偭偨偺偱丄僙儞僒乕儃乕僪偑夡傟傞慜偵傗傠偆偲巚偭偰偄偨嶌嬈偵拝庤丅丂偦傟偼丅丅懌偺媡塣摦妛寁嶼偱偡丅乮摨帪偵弴塣摦妛寁嶼傕丄偩偗偳乯
幬柺偵棫偭偨帪偺巔惃偺昞尰曽朄偑婥偵擖傜側偄偺偱曄峏偟偨偄側偀偲巚偭偰偄偨偺偱偙偺婡夛偵廋惓偡傞偙偲偵偟傑偟偨丅崱傑偱偼僕儍僀儘偺僼傿乕僪僶僢僋傪懌庱僒乕儃偵偐偗傞偨傔丄懌庱僒乕儃偵偩偗巔惃偑斀塮偡傞傛偆側昞尰曽朄傪庢偭偰偄偨偺偩偗偳丄偦偺曽朄偩偲丄僗僞儞僗傪峀偘偨帪偵偼峀偘偨暘偩偗偍偐偟側曽岦偵僕儍僀儘曗惓偑偐偐偭偰偟傑偄傑偡丅幚幙偼栤戣側偄偺偩偗偳偪傚偭偲婥偵側偭偰偄偨偺偱捈偟傑偟偨丅丂昞尰偼慺捈偵側偭偨偺偩偗偳丄IK寁嶼検偼偖傫偲憹偊偰偟傑偭偨丅
媡塣摦妛寁嶼偼姰惉偟偨偗偳丄弴塣摦妛寁嶼偑傑偩丅丂傕偆俀帪慜偩偐傜崱擔偼揦偠傑偄丅丂懕偒偼柧擔偩側丅
仭俋寧俀擔仭
嶐擔偺懕偒偱懌偺巔惃寁嶼幃偺惍旛丅
埲慜偼悘暘偲嬯楯偟偨偗偳丄悘暘偲姷傟偰偒偰丄偝偔偝偔偲廋惓偱偒傑偟偨丅丂偙傫側偙偲側傜傕偭偲憗偔傗偭偲偒傖傛偐偭偨偐側乕丅丂偙偺曄峏偼傎偲傫偳昞偵偼弌偰偙側偄挻儅僀僫乕側曄峏側偺偱丄岲傒偺栤戣偱偟偨丅
偮偄偱偵摲懱偺巔惃昞尰傕屢娭愡偺幉峔惉偵崌傢偣偰曄峏偟傛偆偐偲巚偭偨偑丄僐乕僪廋惓偺塭嬁搙偑戝偒偡偓傞偲敾抐偟偰偙偪傜偼抐擮丅丂挻儅僀僫乕側岲傒偺栤戣傪偁傫傑傝奼戝偟偪傖偄偐傫偱偡偐傜丅
偙傟偱懌偺巔惃寁嶼幃偺廋惓偼姰椆丅
師偼儅僯僺儏儗乕僞偺憖嶌僋儔僗偺幚憰傪傗傝偨偄傫偩偗偳丄偳偆偟傛偆偐側丅丂儅僯僺儏儗乕僞偭偰尵偭偰傕僣儊偑奐暵偡傞偩偗側傫偩偗偳丅丅丅
奐暵偩偗偠傖側偔偰妏搙傪娔帇偟偰丄儌僲傪偮偐傔偰偄傞偐偳偆偐傪敾抐偡傞偭偰巇慻傒傕擖傟傞丅丂偙傟偼傾僀儃乮ERS-7乯偱儌僲傪欨偊傜傟傞傛偆偵偟偨帪偵傕幚憰偟偨偺偩偗偳丄巜帵妏搙偲尰忬妏搙偺嵎傪尒偰敾抐偟傑偡丅RS302CR傪巊偭偰傞偐傜僩儖僋傗僐儞僾儔僀傾儞僗傪挷惍偟偨傝丄妏搙偩偗偠傖側偔丄晧壸傪尒偰偮偐傫偱偄傞偐偳偆偐傪娍帊偡傞偙偲傕偱偒傞偼偢丅
丂
偲丄巚偭偰偄偨偺偩偗偳丄偍庤揱偄僾儘僕僃僋僩傪尒偰丄巚偭偨偺偼扨娽偱偺尷奅丅丂恖娫偑憖嶌偟偰傕扨娽偠傖怓乆擄偟偄傫偱偡偹丅丂儘儃僢僩偵敾抐偝偣傞側傜側偍偝傜丅丂僗僥儗僆棫懱帇偺昁梫惈傪姶偠傑偟偨丅丂RPU-100偠傖椉栚偼僒億乕僩偱偒側偄偺偱僟儊側傫偩偗偳丄偍偐偘偱儅僯僺儏儗乕僞偱儌僲傪偮偐傓偭偰張棟傪恑傔傞儌僠儀乕僔儑儞偑壓偑偭偰偟傑偭偰偄傑偡丅丂彴偺傕偺尷掕偱偺僀儞僾儕傪恑傔傞傋偒側傫偩傠偆偗偳側偀乣丅(>_<)
丂
偁偲丄堦偮栤戣偑丅
僯儏乕僙儞僒乕儃乕僪偺揹尮傪搳擖偟偨偲偒偵CPU偑儘僢僋偟偰偟傑偆尰徾偑昿敪偡傞丅丂偳偆傗傜揹尮搳擖帪偺僲僀僘乮傕偟偐偟偰僗僷乕僋偐丠乯偱岆摦嶌偟偰偟傑偄丄儕僙僢僩偟偰傕暅妶偟側偄丅丂僴乕僪揑側張抲偑昁梫側傛偆偱偡丅丂僐儞僨儞僒擖傟傝傖捈傞偐側丅
仭俋寧俁擔仭
崱擔偼挬偐傜戝嶃弌挘丅丂儎僼乕偱挷傋偨揹幵偺帪娫偵崌傢偣偰巜掕惾傪庢偭偰丄偦傟偵崌傢偣偰嵟婑墂偐傜揹幵偵忔偭偨偺偩偑丄実懷偱挷傋偨傜娫偵崌傢側偄偙偲偵側偭偰傞両丂偪傚偭偲柪偭偨偑丄忔姺墂偱巜掕惾傪曄峏偟偰20暘傎偳抶偄怴姴慄偵曄峏丅
墶昹慄偵忔傠偆偲偡傞偲丄偳偆傗傜墶昹慄偑抶傟偰偄傞條巕丅丅丂偙傝傖偀巜掕傪曄峏偟偨偺偼價儞僑偩偭偨側乕丄偲巚偭偰偄偨傜抶傟偰偄偨揹幵偑偡偖偵棃偰丄尦傕偲偺怴姴慄偵娫偵崌偭偰偟傑偭偨丅乮偓傝偓傝偩偭偨偗偳丅丅乯丂僫僀僗敾抐偩偭偨偺偐僴僘儗偩偭偨偺偐丄旝柇丅丅丅
婣傝偺怴姴慄傕嵼棃慄偑抶傟偰偄偰丄儅僕偱偓傝偓傝偩偭偨丅丂娫偵崌偭偨偗偳丅丅
丂
崱擔偼壛懍搙僙儞僒乕偺儗儀儕儞僌丅丂僙儞僒乕偑曄傢偭偨偺偱庢摼抣偺僗働乕儖偑曄傢偭偰偄傞丅丂惷巭帪偺摲懱巔惃偼壛懍搙僙儞僒乕偺抣偐傜嶼弌偟偰偄傞偺偱儗儀儖傪崌傢偣傞昁梫偑偁傞丅埲慜偺僙儞僒乕偑75偱1G偩偭偨偺偵懳偟偰崱夞偺僙儞僒乕偼200偱1G側傫偱偡偹丅壛懍搙僙儞僒乕傕丄僕儍僀儘僙儞僒乕偵晧偗偢楎傜偢僲僀僘偑忔偭偰傑偡丅丂僕儍僀儘偲堘偭偰椵愊偟側偄偺偱偁傑傝婥偵偣偢偲傕傛偄偺偩偗偳丅
偪側傒偵僕儍僀儘傕曄姺學悢偑曄傢偭偰丄偙偪傜偼慜偑193偩偭偨偺偑丄崱夞偼100丅丂90搙夞揮偟偨帪偺椵愊抣偼丄慜偼3860偱丄崱夞偼2000丅庢摼廃婜偵埶懚偡傞抣偱偡丅庢摼廃婜偼25ms偱偟偨丅
崱擔偼偙傟偟偐偱偒側偐偭偨側偀丅丂庤偑曄傢偭偨偐傜婲偒忋偑傝儌乕僔儑儞偵庤傪擖傟傞昁梫偑偁偭偰丄偦傟傕崱擔傗傞梊掕偩偭偨偺偩偑丅丅丂偪傫偨傜偟偰傑偡偹偉丅
仭俋寧俈擔仭
嶐擔偼偍庤揱偄僾儘僕僃僋僩偺寛彑丅丂娤偵峴偭偰棃傑偟偨丅
愳嶈傾僛儕傾偺傾僛儕傾峀応偱偭偰偙偲偼抧壓奨偺僆乕僾儞僗儁乕僗偱偺奐嵜側傫偱偡偹丅
愳嶈偼抧尦偩偟丄11帪偐傜偩偟丄偭偰偙偲偱挬偐傜儔儉僟偺婲偒忋偑傝儌乕僔儑儞廋惓側偳傪傗偭偰偍傝傑偟偨丅丂媡塣摦妛寁嶼偺娭悢傪曄峏偟偨偺偱偁傞庬偺巔惃偱偼悘暘偲塭嬁傪庴偗偰偟傑偄傑偡丅丂峏偵偼榬偺宍忬偑曄傢偭偨偙偲偱偺嵎暘傕娷傔偰僷儔儊乕僞偺曄峏側偳傪傗偭偰傑偟偨丅
偦偆偄偆傢偗偱40暘傎偳抶崗偟偰尰抧摓拝丅丂偡偱偵僩僐僩僐娵傗傾僄儘僽儖乕偺僼傽僢僔儑儞僔儑乕偼廔椆偟偰偄傑偟偨丅僩僐僩僐娵偺僼傽僢僔儑儞僔儑乕傪尒摝偟偨偺偼幐攕偩偭偨傛偆偱偡丅儘儃僢僩偵憗拝懼偊傪偝偣傞側偳偲偄偆偺偼儘儃僢僩揑僄儞僞儊偺梇丄栐栰偝傫側傜偱偼偺墘弌丅丂僼傽僢僔儑儞僔儑乕偲偄偆僀儀儞僩柤偵偆偭偐傝偲偩傑偝傟偰偟傑偄傑偟偨丅
僆乕僾儞僗儁乕僗側偺偱晛抜偼儘儃僢僩偺僀儀儞僩側偧愨懳尒側偄恖偨偪偑棫偪巭傑傝丄嫀偭偰偄偒傑偡丅廃傝偺恖偨偪偺斀墳偑側偐側偐柺敀偐偭偨偱偡丅
偍嬥傪埇偭偰攦偄暔偵岦偐偭偨僋儘儉僉僢僪偑偆偭偐傝偍嬥傪棊偲偟偰偟傑偭偨偲偒丄乮偔傁傁偝傫偼慡慠婥晅偄偰偄側偐偭偨傜偟偄偱偡偑乯丂乽偍嬥傪廍傢側偄偹乕乿乽偍嬥偼廍傢側偄傫偩乕乿偲偍嬥偵幏拝(^_^;)丂揮搢偐傜婲偒忋偑傟傞偙偲偼乽偍偋偋偋乣乿偲娊惡偑忋偑傞偺偩偗偳丄偍嬥傪棊偲偟偨偺偵婥晅偐側偄偙偲傗偍嬥傪廍傢側偄乮廍偊側偄乯偙偲偼堄奜側傛偆偱偡丅丂幚偼媄弍揑偵偼偦偪傜偺曽偑奿抜偵擄偟偄偺偱偡偑丅
偍攦偄暔傪偦偮側偔偙側偟偰偄偨側丄偲姶偠偨偺偼僩僐僩僐娵丄僼傽僀僽丄傾儕儌僾儗僫丅丂僼傽僀僽偼尰忬偱偺尰幚夝偲偟偰丄摢偵偁傞僗僀僢僠傪揦堳偵墴偝偣傞偙偲偱嫮惂僐儈儏僯働乕僔儑儞傪偲傞庤抜傪偲偭偰偄傑偟偨丅丂側傞傎偳傾僀僨傿傾側傫偩偗偳丄尰幚揑夁偓傞偐側偀偲偪傚偭偲巚偭偨傝偟傑偟偨丅
帺暘揑偵偼尰嬥傪埇傝掲傔偰乮棊偲偟偪傖偭偨偗偳乯攦偄暔偵峴偒丄丂娫堘偊偰廳偄孋傪慖傫偱偟傑偭偰丄偦傟傪戃偵擖傟偰堷偒偢傝偮偮曕偄偰偄偨僋儘儉僉僢僪偑愗側偄傎偳偵椙偐偭偨偱偡丅丂偨偟偐丄傢傫偩傎乣偱偼僈儖乕偑儃僩儖僩儔僋僔儑儞偱偐偛傪慜偐傜堷偭挘偭偰曕偄偰傑偟偨偗偳丄偁偺儌乕僔儑儞傪巊偊偽廳偄壸暔傪堷偒偢偭偰曕偗偨偺偱偼丠
偁偲丄帺摦捛旜偺僇乕僩偲將偠傠偆傪堷偒楢傟偰攦偄暔偵棃偨偔傑偨傠偆偑搑曽傕側偔偐傢偄偐偭偨偱偡傛丅丂偄偸偠傠偆偑柪巕偵側偭偰偟傖偑傒崬傓儌乕僔儑儞偑敪摦偟側偐偭偨偺偼偲偰傕巆擮偱偡丅(^丅^)
懌傪嶌傝捈偟偰寛彑偵朷傫偩傾僄儘僽儖乕丅丂尒堘偊傞傛偆偵埨掕偟偨曕峴偱丄僇乕僩傪墴偟側偑傜曕偄偰偄傑偟偨丅丂僇乕僩傪偮偐傫偩傑傑曽岦曄姺傑偱偟偰偄偨偺偼偡偛偄偱偡偹丅尒偨偲偙傠忋敿恎偼摨婜偟偰摦嶌偟偨傝偼偟偰偄側偐偭偨偺偱丄偦傟偩偗嵍塃偺怳暆偑彫偝偄儌乕僔儑儞偱曕偄偰偄偨偲偄偆偙偲偱偡丅
栤戣偑偁傞側偲姶偠偨偺偼僐儈儏僯働乕僔儑儞丅丂夛榖偑惉傝棫偨側偄僔乕儞偑懡夁偓丅丂屻敿偵側傞偵偮傟丄揦堳偑忬嫷傪棟夝偟偰桪偟偔側偭偰峴偒傑偟偨丅
僩僐僩僐娵偼懪偪崬傒偱壒惡崌惉丅丂傾僄儘僽儖乕偼IP偱壒惡揱憲丅丂偦偺懠偼巇崬傒壒惡偺嵞惗丅丂壒惡揱憲傪巊偭偨傾僄儘僽儖乕偑堦斣僗儉乕僘偐偲尵偆偲丄揱憲儔僌偑戝偒偔偰塹惎拞宲傒偨偄偵側偭偰傑偟偨丅桪愭惂屼偟偰壒惡儔僌傪嵟彫偵偡傞側偳偺懳張偑昁梫偺傛偆偱偡丅丂巇崬傒壒惡偼梡堄偟偨戜帉偑偡偖偵弌偰偙側偄偺偲僔僠儏僄乕僔儑儞偑梊憐傪挻偊偰偄偰揔偟偨戜帉偑梡堄偝傟偰偄側偄偙偲丅偄傗偀乣丄戞擇夞傑偱偵傗傞偙偲偄偭傁偄偁傝傑偡偹乕丅
丂揤壓乮抧壓偩偗偳乯偺墲棃偵偟傖偑傒崬傫偱偟傖傋傝偙傓偍偠偝傫偨偪丅丂蛋矌q嫙偑尒偰傞傛偋乣丅
偦傠偦傠寛彑傕廔傢傞偭偰偙傠偵偼奜栰偺榖戣偼儘儃儚儞戝夛偺僗儘乕僾傪偳偆傗偭偰僋儕傾偡傞偐丄偲偄偆榖戣偵側偭偰偄傑偟偨丅
愭擔丄擣掕尃傪僎僢僩偟偨僈僢僩傪昅摢偵戝宆儘儃偺懡偔偼儕儞僋峔憿傪嵦梡偟偰偄傑偡丅丂愭偛傠偐傜榖戣偵偟偰偄傞儕儞僋峔憿偲擇娭愡嬝偺娭楢偐傜傕柧敀側傛偆偵儕儞僋峔憿偲幬柺曕峴偼旕忢偵憡惈偑埆偄偼偢丅
壗傛傝暯扲側楬柺偲偁傞掱搙偺孹幬傪帩偭偨楬柺傪摨偠曕梕偱曕偔偭偰偺偼柍棟側傫偠傖側偄偐偲巚偄傑偡丅儔儉僟側傜偳偆傗傞偐側偀丅丂儔儉僟偼暯抧傪曕偔偺偑傗偭偲丅丂幬柺側傫偐傑偩傑偩愭偺榖側傫偱偡偑丄曕峴傪埨掕壔偝偣傞偵偼偗傝懌偺惂屼傪偳偆偡傞偐丄偲偄偆栤偄偐傜乽奒抜傪偳偆傗偭偰徃傞偐乿偲偄偆撪晹愝栤傪偟偰懌峔憿傗惂屼曽朄傪傪峫偊偰偄傞嵟拞側偺偱偄偔偮偐傾僀僨傿傾偼偁傞偺偩偗偳丄傑偩宍偵側傜側偄偱偡傛丅亜側偖偝傫
曕梕偺愗傝懼偊偲偄偆晹暘偱偼丄丂擣抦妛偺悽奅偱傾僼僅乕僟儞僗偭偰峫偊偑偁傞偺偩偗偳丄偦偺拞偱傕僥僋僗僠儍乕偑廳梫側忣曬偵側偭偰偄傞偲偄偆榖偑偁傝傑偡丅丂恖娫偑曕偔偲偒傕栚傪偮傇偭偨傑傑偱媫偵孹幬偑曄傢傞偲偮傫偺傔偭偰偟傑偆偺偱丄曕偔愭偺楬柺偑偳偆側偭偰偄傞偐傪敾抐偟偰孹幬偵嵎偟妡偐傞僞僀儈儞僌傪恾傝側偑傜曕梕傪愗傝懼偊偰偄傑偡丅丂傑偩夋憸張棟偱僥僋僗僠儍乕偐傜楬柺偺孹幬傪應傞偭偰偺偼擄偟偄偲巚偆偺偱丄偣傔偰暯扲側楬柺偲孹幬偺偁傞楬柺偑堘偆怓偵側偭偰偄傞偲偐丄偦偆偄偆攝椂偑偁傟偽壗偐偱偒傞偐傕抦傟側偄偱偡偹丅丂僼儔僢僔儏傗憶壒偱岆摦嶌偡傞傛偆側儘儃僢僩偼僟儊偩偭偰偺偑儘儃儚儞僗僞僀儖側偺偱娐嫬傪堈偟偔偟偰偔傟偭偰偺偼婜懸偟偪傖偄偗側偄偺偐傕偟傟側偄偱偡丅丂偨偩丄僙儞僒乕傪巊偭偰儘儃僢僩偵壗偐傪敾抐偝偣傞僼僃乕僘偵嵎偟妡偐偭偰傞偐偲巚偆傫偱偡偑丄偁傞掱搙偼娐嫬傪峫偊側偄偲恑曕偺栚傪揈傫偱偟傑偆偺偱偼側偄偐側偲巚偄傑偡丅
偦偺屻丄儘儃儚儞埾堳夛偲堦弿偵懪偪忋偘偵峴偒傑偟偨丅丂偡偛偔怓乆偁偭偨傫偩偗偳丄擔帍彂偄偰偰媥擔偑廔傢偭偨傜僔儍儗偵側傜傫偺偱偙偺曈偱丅丂偁丄師夞偺偍偰僾偺僥乕儅偼崱夞偲偼曄傢傞傜偟偄偱偡丅偦傝傖偦偆丄偦傝傖偦偆側傫偩偗偳側丅
仭俋寧俋擔仭
幚偼俈擔偵偍偰僾偺偙偲傪擔帍偵彂偄偨屻偐傜丄愭傎偳傑偱偳偭傉傝偲偼傑偭偰偍傝傑偟偨丅
偍偰僾寛彑偵峴偔擔偺挬偵儌乕僔儑儞偺廋惓偵拝庤偟偰偄偨偺偱偡偑丄俈擔偼堦擔婲偒忋偑傝偺儌乕僔儑儞廋惓側偳傪偟偰偄傑偟偨丅
懌偺巔惃昞尰傪曄峏偟偨偙偲偱偺丄媡塣摦寁嶼偲弴塣摦寁嶼娭悢偺廋惓偼廔偊偰偄偨偺偱偡偑丄曕峴埲奜偺儌乕僔儑儞偱偼寚偐偡偙偲偺偱偒側偄乮儔儉僟偺懌峔憿偐傜婲場偟偰偄傞偺偱晛捠偺懌峔憿側傜娭學側偄傫偱偡偑乯J1Z張棟偵傕戝偒偔塭嬁偡傞偙偲偑傢偐傝傑偟偨丅丂偲傝偁偊偢丄暯抧偱偺J1Z曄姺偩偗偼偡偖偵懳墳偟偰儌乕僔儑儞廋惓傪懕偗偨偺偱偡偑丄偍帿媀忬懺偵側傞偲丄憡懳揑偵幬柺偱偺J1Z曄姺偑昁梫偲側傝丄偙傟偼偡偖偵懳墳偱偒側偝偦偆丅
峏偵偼娭愡妏搙偺摦嶌堟奜傊偺巜帵傪僉儍儞僙儖偡傞張棟傪壛偊偨偲偙傠丄偝偭傁傝棫偪忋偑傟側偔側偭偨傝傑偱偟傑偟偨丅丂偦偺屻丄帋峴嶖岆偺寢壥丄棫偪忋偑傝偼偱偒偨偺偱偡偑丄偍帿媀忬懺偱偺J1Z曄姺偼壽戣偲側偭偨偺偱偡丅
擔梛擔偼敿揙栭偱帋峴嶖岆偟丄乮峫偊偡偓偰摢偑嫽暠偟偪傖偭偰丅丅(^^乁丂乯丂寧梛擔偼傾僀僨傿傾傪惍棟偟偰嵞搙僩儔僀偟偨偑寕捑丅丅丅丂偦偟偰壩梛擔偺崱擔丄偝偒傎偳傗偭偲擟堄幬柺偱偺J1Z曄姺偺幚憰偑偱偒傑偟偨丅
 丂丂
丂丂 丂偙傟偑偱偒側偄偲彴偺儌僲偑廍偊側偄傫偱偡傛丅
丂偙傟偑偱偒側偄偲彴偺儌僲偑廍偊側偄傫偱偡傛丅
崱夞偺懌偺巔惃昞尰偺曄峏偼丄幬柺傊偺懳墳傪懌庱偩偗偱昞尰偟偰偄偨偺偱偡偑丄幚偼僫儞僠儍僢僥俬俲偵側偭偰偍傝傑偟偨丅
偱傕丄偦偺偍堿偱乮岆嵎偼彮偟偁傞傕偺偺乯幬柺偵懳墳偡傞偺傕懌庱偲偦偺懠偺巔惃傪暘棧偟偰寁嶼偱偒偰偄傑偟偨丅僗僞儞僗傪戝偒偔偲傞偲岆嵎偑戝偒偔側偭偨傫偱偡偗偳丄幚梡忋偼傑偀栤戣側偄丅
偦偺傑傑偱傕峔傢側偄偭偪傖偀峔傢側偐偭偨傫偩偗偳丄偢乕偭偲婥偵側偭偰偨偐傜巚偄愗偭偰崱夞捈偟偰偟傑偭偨偲偄偆傕偺偱偡丅
偱偡偑丄J1Z曄姺偱偼懌晹偺巔惃妏搙丄摿偵僠儖僩偲儘乕儖乮僺僢僠偲儓乕偺曽偑揱傢傞偐乯偑娭楢偟偰偄傞偺偑栤戣偱丄寁嶼曽朄偑傢偐傝傑偣傫偱偟偨丅
崱夞偼側傫偲偐夝寛偟偨偗偳丄側傫偩偐傕偆戝曄偱偡偹丅丂偙偺懌峔憿偵偙偩傢傞偮傕傝偼側偄傫偱偡偑丄儊僇偺尒捈偟傪偟偰奐敪偑屻戅偡傞偺偑僀儎偱摜傫偽偭偰偟傑偄傑偟偨丅丂栤戣傕夝寛偟偨偟丄偦傠偦傠偙偺懌峔憿傕傗傔偪傖偭偨曽偑偄偄偐傕抦傟傑偣傫丅
IK偱摦偐偡儘儃僢僩偺懌峔憿偼戝戁儘乕儖偼嵦梡偡傋偒偠傖側偄偱偡偹丅
偝偰丄朰傟側偄偆偪偵儊儌傪彂偄偰偍偐側偒傖丅丅
仭俋寧侾侽擔仭
J1Z曄姺偼姰椆偟偰偄傑偣傫偱偟偨丅
嶐栭丄擔帍傪彂偄偨屻丄棫偪忋偑傝儌乕僔儑儞傊偺愜崬傪峴偭偨偲偙傠丄偍偐偟偄嫇摦偑敪妎丅丂埥傞巔惃偱懌庱偑偦偭偔傝曉傞偙偲偑敾傝傑偟偨丅
偄傠偄傠偄傠偄傠挷傋偨寢壥丄婎杮偲側傞媡塣摦寁嶼偱丄妏搙偵曗惓傪偐偗偰偄傞晹暘偑埆塭嬁偟偰偄傞偙偲偲丄懌棤偺幬柺偐傜娭愡妏搙傪嶼弌偡傞晹暘偱亇90deg傑偱偟偐峫椂偟偰偄側偄偙偲偑栤戣偱偁傞偙偲偑傢偐傝傑偟偨丅
媡塣摦妛寁嶼偺曗惓偲偄偆偺偼丄揔摉偵曗惓偟偰偄傞傢偗偱偼側偔丄丂屢娭愡偺巔惃傪嶰偮偺僒乕儃偱昞尰偟偰偄傞偺偩偗偳丄埥傞巔惃傪昞尰偡傞妏搙偺慻傒崌傢偣偼2偮偁傝傑偡丅丂偙偺2偮偺慻傒崌傢偣偺偆偪丄僒乕儃偺摦嶌斖埻偵廂傑傞曽傪嵦梡偡傞昁梫偑偁傞偺偱偡偑丄扨弮偵寁嶼偟偨傜丄僒乕儃偺摦嶌斖埻傪挻偊偨寁嶼寢壥傪弌偡偙偲偑偁傝丄偙傟傪偙偪傜偺搒崌偺偄偄傎偆偵愗傝懼偊傞偨傔偺曗惓偱偡丅
偲偙傠偑丄婔壗揑偵偼偙偺2偮偺慻傒崌傢偣偼堘偆傕偺傜偟偔丄曗惓傪偐偗偨妏搙楍偱偼弴塣摦寁嶼偲媡塣摦寁嶼偱憡屳曄姺偑弌棃側偔側偭偰偟傑偆偙偲偑偁傞傛偆偱偡丅
偙偺偨傔丄J1Z曄姺偺拞偱峴偭偰偄傞媡塣摦寁嶼偲弴塣摦寁嶼偱偙偺晄惍崌偑婲偙傝丄寢壥偲偟偰懌庱偺僒乕儃偵偦偺偟傢婑偣偑棃偰懌庱偑偦偭偔傝曉傞偲偄偆偙偲傜偟偄偱偡丅
偱傕丄媡塣摦妛寁嶼偱偺曗惓偼昁恵偱丄曗惓傪偐偗側偄偲傠偔偵摦偗側偔側傝傑偡丅丂巇曽偑柍偄偺偱娭悢撪偵曗惓僗僀僢僠傪帩偪丄J1Z曄姺撪偱媡塣摦寁嶼偑屇傃弌偝傟傞応崌偼曗惓僗僀僢僠傪愗傞傛偆偵偟傑偟偨丅
傑偨丄幬柺偺孹偒偑亇90deg傪挻偊傞応崌偺張棟偱偡偑丄J1Z曄姺忋偺幬柺偼摲懱巔惃偑悅捈側忬懺偵曄姺偟偰懌庱巔惃傪寁嶼偟偰偄傞偺偱丄悅捈傪挻偊傞彴柺傪峫偊傞昁梫偼柍偄傛偆偵巚偊傞偺偱偡偑丄寁嶼懳徾偼彴柺偲泺偺娭學側偺偱丄偟傖偑傒崬傫偩応崌側偳偵挻偊偰偟傑偆応崌偑偁傝傑偟偨丅丂偙傟傕娭悢傪atan( )偐傜atan2( )偵曄峏偡傞偙偲偱夝寛丅
偙傟偱傗偭偲尒偊偰偄傞晄嬶崌偼夝徚偟傑偟偨丅
偦傟偵偟偰傕媡塣摦妛偼擄偟偄偱偡丅丂儔儉僟偺懌側傫偐丄偡傋偰捈岎偵偟偰偄偰丄夝愅夝偑摼傗偡偄峔憿偵側偭偰偄傞偺偵丄幬柺偵懳墳偡傞寁嶼傪僒億乕僩偡傞偩偗偱偙偺憶偓偱偡丅丂戝戁晹偵儘乕儖幉乮儓乕幉乯傪擖傟偨偙偲偑丄栤戣傪傗傗偙偟偔偟偰偄傞偺偱偡偑丄偙偺峔憿偵棊偪拝偄偨偲偒偼僫僀僗側幉峔惉偩偲巚偭偰擺摼偟偰偄偨傫偱偡偗偳偹丅丂娭愡峔憿傪尋媶偟偰偄傞側傜傑偩偟傕丄憤崌揑偵儘儃僢僩傪恑傔偨偄傢傝偵堄抧偵側偭偰惓偟偄夝愅夝偵偙偩傢偭偨傝偡傞偺偼傎傔傜傟偨傕偺偠傖側偄偱偡丅
帺屓斸敾偼偝偰偍偒丄忕挿帺桼搙偑柍偔丄娭愡偑捈岎偟偰偄傞儔儉僟偺懌偱偝偊偙傫側戝曄側偺偩偐傜丄婔壗妛寁嶼偱偺娭愡憖嶌偼傗傔偰偄偐側偄偲偄偐傫偱偡偹丅
偍庤揱偄僾儘僕僃僋僩傪尒偰偄偨偲偒丄儘儃僢僩偑婘偵嬤偯偄偰偄偔偲榬偑婘偵姳徛偟偰偆傑偔儌乕僔儑儞偑摥偐側偐偭偨傝丄偦偺偣偄偱儘儃僢僩偑摦偄偰偟傑偭偰埵抲偑偢傟偰偟傑偭偨傝偟偰偄傑偟偨丅丂偁傟偠傖僟儊偱丄擻摦娭愡傕丄忬嫷偵傛傝庴摦娭愡偵側傞傛偆側惂屼曽朄偺廳梫惈傪姶偠傑偟偨丅丂偞偭偔傝偟偨僀儊乕僕偲偟偰偼丄摦嶌帪偺娭愡晧壸傪僼傿乕僪僶僢僋偟丄晧壸偺彮側偄摦嶌傪慖戰偟偮偮丄庤愭嵗昗偼夋憸僨乕僞偐傜僼傿乕僪僶僢僋偟丄帺慜偱儎僐價峴楍憡摉偺憡娭娭悢乮娭悢偺宍偱偁傞昁梫偼側偄偱偡偑丄曋媂忋乽娭悢乿乯傪惗惉偡傞傛偆側惂屼僔僗僥儉偲側傞偺偱偼側偄偐偲巚偄傑偡丅
懌巔惃昞尰偺曄峏偵傛傞偛偨偛偨偼嫲傜偔廔椆偱偡丅丂傗偭偲乽傾僾儘乕僠乿傑偱栠偭偰偒傑偟偨丅
仭俋寧侾俀擔仭
崱擔偼J1Z曄姺偺姰椆婰擮偵偪傚偭偲婑傝摴傪丅
攦偭偨傑傫傑偵側偭偰偄傞SEMB1200A偺奐敪娐嫬偺僀儞僗僩乕儖傪偟傑偟偨丅
僀儞僗僩乕儖偲尵偭偰傕偄偪偐傜峔抸偡傞傢偗偠傖側偔偰丄sugi3 偺庯枴偺儁乕僕偱僟僂儞儘乕僪偱偒傞僶僀僫儕乕僷僢働乕僕傪揥奐偡傞偩偗偱偡丅丂堦斣戝曄偩偭偨偺偼CygWin偺僀儞僗僩乕儖偩偭偨傝偟偰丅丅
僥僗僩僾儘僌儔儉傪僐儞僷僀儖偟偰揮憲偟偰摦偐偟偨傝偟偰偄偨偺偱偡偑丄偙側偄偩偮偗偨曻擬斅偼怗傟傞偐怗傟側偄偐僊儕僊儕偔傜偄傑偱擬偔側傝傑偡丅CPU偑偄偭偰偟傑偭偨傜僔儍儗偵側傜傫偺偱懄惾偱僸乕僩僔儞僋偵僼傽儞傪庢傝晅偗傑偟偨丅

僼傽儞傪僸乕僩僔儞僋偺忋偵抲偄偰偁傞偩偗側傫偱偡偗偳丄偙傟偱僼傽儞偼悘暘偲椻偊傑偡丅丂敄偄僸乕僩僔儞僋亄僼傽儞偺曽偑偄偄偺偐丄偱偭偐偄僸乕僩僔儞僋偺曽偑偄偄偺偐丄僼傽儞偼彫偝偔偰傕廫暘側偺偱丄儘儃僢僩偵愊傓偙偲傪峫偊傞偲僼傽儞傪愊傫偩曽偑偄偄偺偐傕偟傟側偄偱偡丅丂偱傕僼傽儞偑巭傑偭偨傝偟偨傜怱攝偩側丅僼傽儞傾儔乕儉傪晅偗偰僼傽儞偑巭傑偭偨傜揹尮傪愗傞傛偆偵偡傞偲偐偺張抲偑昁梫偐傕抦傟側偄偱偡丅丅
SEMB偺曽傕傏偪傏偪偲恑傔偹偽丅師偼SEMB偺偨偔偝傫偁傞COM億乕僩慡偰傪RS485偵偡傞梊掕偱偡丅乮COM1傪彍偔乯丂偦傟偑偱偒偨傜僔僌儅偵愊傫偱娭愡忣曬傪庢摼偟側偑傜曕峴偡傞偭偰偺傪傗偭偰傒傞丅丂10擔偺擔帍偵彂偄偨擻摦亄庴摦娭愡偭偰偺傪偳偆傗偭偨傜幚尰偱偒傞偐偭偰偺彮偟峫偊偰傒偨偺偩偑SEMB側傜僥僗僩偔傜偄偼偱偒傞偐傕偟傟側偄丅丂偱傕丄SEMB偱傗傞偲寢嬊偼僼傿乕僪僶僢僋廃婜偼僒乕儃偺僐儅儞僪忦審偱寛傑偭偰偟傑偆丅丂僼傿乕僪僶僢僋廃婜10ms掱搙偠傖偪傚偭偲柍棟偐側丅丅(^^乁
仭俋寧侾俁擔仭
側傫偩偐擏懱揑偵旀傟偰偄傞傛偆偱偳偆偵傕僂僟僂僟婥暘丅丂挬偼偦偙偦偙憗偔婲偒弌偟偰挬怘傪怘傋傞偺偩偗偳丄偦偺屻偵擇搙怮偟偪傖偭偨傝偟偰丅丅丂屵屻傕彮偟弌偐偗偨偁偲婣偭偰偐傜偼拫怮偟偰傑偟偨丅丂偱傕丄旀傟偰偄傞偲偒偼怮傞偺偑堦斣丅
儌乕僔儑儞偑偳偆傕埨掕偟側偄偺偱帋峴嶖岆傪孞傝曉偟偰偄傑偡丅丂偳偆傕榬傪摦偐偟偨帪偺埨掕惈偑埆偡偓傞丅丅丂偁丄丄丄丄偦偆偄偊偽丄儅僯僺儏儗乕僞傪晅偗偰僒乕儃偑捛壛偵側偭偨偺偵晹埵枅偺廳怱僨乕僞傪峏怴偟偰偄側偐偭偨丅丂峏偵偼尐偵僆僼僙僢僩傪偮偗偨偙偲傕僨乕僞偵斀塮偟偰偄側偄丅丂榬偑挿偔側偭偨忋偵枛抂廳検偑憹偊偨偺偩偐傜塭嬁偼戝偒偄偩傠偆丅
俁DCAD傪巊偭偰廳怱偲幙検傪寁嶼丅丂僨乕僞偵斀塮偟傑偟偨丅丂懌棤傪僄儔僗僩儅偵曄偊偨偺偑塭嬁偟偰偄傞偺偐丄傑偩J1Z曄姺偺愗傝懼傢傝僞僀儈儞僌偱偺晄埨掕偝傪巆偟偰偄傞偑丄榬傪慜偵弌偟偨帪偺晄埨掕偝偼側偔側偭偨丅丂庤傪弌偟偨帪偺偍怟偺撍偒弌偟曽偑偪傚偭偲堘偆丅
 丂慜孅乣丅丂抧柺偵庤偑撏偄偨丅丂彴偵棊偪偰偄傞儌僲偼丄側傫偲偐廍偊偦偆偱偡丅
丂慜孅乣丅丂抧柺偵庤偑撏偄偨丅丂彴偵棊偪偰偄傞儌僲偼丄側傫偲偐廍偊偦偆偱偡丅
娭愡惂屼偺僸儞僩傪傕傜偆偨傔偵杮傪攦偍偆偐偲巚偄暔怓丅丂桳杮 戩攷巑偺乬岻傒偝乭偲儘儃僢僩偺椡妛 偙傟偭偰丄抦擻壢妛乗儘儃僢僩偺乬抦乭偲乬岻傒偝乭丂偲偳傟偔傜偄撪梕偑堘偆傫偩傠偆丅(^^乁丂屻幰偼帩偭偰傞偐傜側偀丅丂偳偭偐偱棫偪撉傒偡傞偐丅
偦偺偆偪攦偍偆偲巚偭偰偄偨丂OpenCV 僾儘僌儔儈儞僌僽僢僋丂傕堦弿偵攦偍偆偲偟偨傜傾儅僝儞偵攧偭偰側偄丅丂側傫偩偐偳偙偵傕攧偭偰側偄條巕丅儅乕働僢僩僾儗僀僗偺拞屆偑掕壙傛傝崅偔側偭偰偄傞偟丄壗偑偁偭偨偺偐丠丠丠
仭俋寧侾係擔仭
崱夞偺堦楢偺尒捈偟偵嵺偟偰丄巔惃堏峴摦嶌偺傎偲傫偳偺応柺偱奺娭愡偺壜摦堟偺僠僃僢僋傪峴偆傛偆偵偟丄堦儢強偱傕摦嶌堟傪挻偊傞応崌偼偦偺僼儗乕儉傪幚峴偟側偄偲偄偆張棟偵偟偨丅丂偦偆偟偨偲偙傠丄棫偪忋偑傝儌乕僔儑儞側偳偑傎偲傫偳偆傑偔偄偐側偔側傝傑偟偨丅
偄傑傑偱乽棫偪忋偑傟傞乿偲巚偭偰偄偨偺偑嬼慠偲偄偆偐応摉偨傝揑側傕偺偱偁偭偨偺偑朶業偝傟偨丅丂僾儘僌儔儉傪廋惓偟偨傝丄儌乕僔儑儞傪岺晇偟偨傝偟偰側傫偲偐棫偪忋偑傟傞傛偆偵偼側偭偨丅丂側偭偨偵偼側偭偨偺偩偑丄杮棃偼儌乕僔儑儞傪惗惉偝偣偨偄偲巚偭偰偄傞偺偵丄偙偺旝柇側挷惍傪僾儘僌儔儉偱惗惉偝偣傞偭偰偺偼側偐側偐偵擄偟偄丅丂摦嶌惂屼偵偮偄偰偼寁嶼偩偗偠傖側偄傕偺偑昁梫偩側偀偲姶偠傞偙偲偑懡偔側偭偨崱擔偙偺崰偱偡丅丂帋峴嶖岆偺巇慻傒傪恀寱偵峫偊偰傒傛偆偐側丅
丂
傆偄偵巚偄棫偭偨偺偱丄SEMB1200A偺COM億乕僩偵RS485僀儞僞乕僼僃僀僗傪偮偗偰捠怣偝偣偰傒傛偆偲偟偨偺偩偑丄SEMB偺COM億乕僩偼3.3V弌椡傜偟偄丅丂MAX485偼5V偺僠僢僾側偺偱儗儀儖僐儞僶乕僞偑昁梫丅丂儗儀儖曄姺偵偮偄偰偼愺憪僊尋偵偙傫側儁乕僕偑偁偭偰徻偟偔愢柧偝傟偰傑偡丅丂3.3V仺5V丂5V仺3.3V丂3.3V仼仺5V丂偦傟偧傟偺曄姺偑弌棃傞晹昳傪拲暥偟傑偟偨丅丂SEMB偵偼偄偭傁偄RS485傪偮偗偰摨帪偵捠怣傪偡傞偭偰偺傪傗偭偰傒傞偮傕傝側偺偱RS485傕懌傝側偄暘傪攦偄懌偟傑偟偨丅偭偰尵偭偰傕庤帩偪崌傢偣偰8屄偩偗偳丅丂晹昳偑棃偨傜偲傝偁偊偢侾夞楬偩偗慻傫偱僥僗僩僾儘僌儔儉傪憱傜偣偰傒傛偆丅
丂
儔儉僟偵傕偳偭偰丄丄丄丂堦墳偼棫偪忋偑傟傞傛偆偵側偭偨偺偱丄傾僾儘乕僠偺楙廗傪偟傛偆偐偲傕巚偭偨偺偩偑丄偦偆偄傗儔儉僟偑夡傟傞慜偵傗傠偆偲巚偭偰偄偨乽戝偒偝偑敾偭偰偄傞儌僲傪僇儊儔偵幨偭偨戝偒偝偱嫍棧傪栚嶼偡傞乿偲偄偆偺傪傗傞偙偲偵丅
傑丄扨側傞斾偺寁嶼側偺偱側傫偰偙偲側偄偺偩偑丄僩儔僢僉儞僌偝偣偰僇儊儔偺拞墰偵偁傞忬懺側傜戝懱偄偄姶偠偺摎偊偑弌傞傛偆偩丅挻峀妏儗儞僘側偺偱廂嵎偑戝偒偔偰夋柺偺抂偩偲傂偢傫偱偟傑偆傫偱偡偹丅
 丂儃乕儖傪尒偮傔傞儔儉僟
丂儃乕儖傪尒偮傔傞儔儉僟
![]() 丂僇儊儔偵幨偭偨儃乕儖丂儃乕儖傪埻偆巐妏偺戝偒偝偐傜嫍棧傪寁嶼偡傞丅
丂僇儊儔偵幨偭偨儃乕儖丂儃乕儖傪埻偆巐妏偺戝偒偝偐傜嫍棧傪寁嶼偡傞丅
![]() 丂倓丗偭偰偺偑儃乕儖傑偱偺嫍棧丂扨埵偼mm
丂倓丗偭偰偺偑儃乕儖傑偱偺嫍棧丂扨埵偼mm
岝偺壛尭傕偁傞偺偱偨傑偵傊傫側悢帤傪弌偟偰傑偡偑丄戝懱170mm偔傜偄
嫍棧傕嵗昗傕傢偐偭偨偐傜偙傟偱偮偐傔傞偼偢側傫偩偗偳丄偙偺儃乕儖偼戝偒偡偓偰儔儉僟偺庤偱偼偮偐傔側偄丅丂偮偐傔傞傕偺傪梡堄偟側偒傖幚尡偱偒側偄側丅(^_^;)
仭俋寧侾俆擔仭
娭搶慻儘儃僢僩楙廗夛偵嶲壛偡傞偨傔丄傠傏偲傑偵峴偭偰棃傑偟偨丅
僼儖憰旛偱嶲壛偡傞偺偵丄偩傋偭偰婣偭偰偔傞偩偗偱奐敪偼偝偭傁傝恑傑側偄偺偑偄偮傕偺楙廗夛嶲壛側偺偩偑丄崱擔偼傂偨偡傜僾儘僌儔儉偲僨僶僢僌丅
側偺偱丄偁傫傑傝傒傫側偵偐傜傑側偐偭偨側乕丅丂偄傗丄楙廗屻偵怘帠偵峴偭偨愭偱偼怓傫側榖偱憡摉惙傝忋偑傝傑偟偨偑丅
 丂儅儖僀僠傑偩撉傫偱側偄傫偩傛偹丅
丂儅儖僀僠傑偩撉傫偱側偄傫偩傛偹丅
楙廗夛夛応偱僾儘僌儔儉偟偰偄偨偺偼丄僌儕僢僾丅丂偨偩儌僲傪偮偐傓偩偗偠傖側偔偰丄巜掕偟偨嫮偝偱捦傒傑偡丅懳徾偺戝偒偝偼乮捦傔傟偽乯娭學側偔丄帺摦挷惍乮偭偰傎偳偠傖側偄偗偳乯偟傑偡丅丂側偺偱丄柍棟傗傝僣儊傪奐偙偆偲偡傞偲丄彊乆偵奐偒傑偡偑丄庤傪棧偡偲偡偄乣偭偲僣儊傪暵偠傑偡丅丂僐儞僾儔僀傾儞僗僗儘乕僾愝掕偲丄僒乕儃妏搙偺庢摼傪巊偭偰峴偄傑偡丅
偁偲丄僙儞僒乕儃乕僪傪嶌偭偨帪偵SPI捠怣偱柍慄僐儞僩儘乕儔傪偮側偄偩偺偱丄儔儉僟傪僐儞僩儘乕儔偱憖嶌偱偒傞傛偆偵側傝傑偟偨丅丂偁偔傑偱帺棩傪栚巜偟偰偄傞偺偱憖廲宆儘儃僢僩偵偡傞偮傕傝偼側偄偺偱偡偑丄僐儞僩儘乕儔偱榬傪憖嶌偱偒傞傛偆偵偟偨傝偟偰梀傫偱傑偟偨丅
 丂儔儉僟偼傾僸儖偪傖傫傪尒偰傞傢偗偠傖偁傝傑偣傫丅丂偨傑偨傑偱偡丅
丂儔儉僟偼傾僸儖偪傖傫傪尒偰傞傢偗偠傖偁傝傑偣傫丅丂偨傑偨傑偱偡丅
偙偺夋憸傪嶣塭偡傞偨傔偩偗偵楙廗夛偐傜婣偭偰儔儉僟傪棫偪忋偘傑偟偨丅(^_^;)
偁丄偦偆偄偊偽OpenCV僾儘僌儔儈儞僌偺杮傪攧偭偰傞捠斕僒僀僩傪尒偮偗傑偟偨丅嵼屔1嶜偱偡丅丂偱傕丄峚岥偺彂揦偵偁傞偲偄偆榖傕暦偄偨偺偱偦偭偪傪愭偵尒偰偙傛偆偐側丅偁偪傜偙偪傜偺彂昡傪尒傞偲丄Web偱尒傟傞儕僼傽儗儞僗偑儊僀儞偭偰側偭偰傞偺偱偪傚偭偲鏢鏞拞丅栚傪捠偟偰偐傜攦偭偨曽偑傛偝偦偆丅
仭俋寧侾俇擔仭
儔儉僟偼慄宍搢棫怳巕偺婳摴傪巊偭偰曕梕傪惗惉偟偰偄傑偡丅
偱偡偑丄忋懱傪巆偟偰丄偄傢備傞儌儞儘乕僂僅乕僋偺傛偆偵曕偐偣傞偲寁嶼抣偱偼慡慠崌傢側偔偰墶偵偡偭偲傫偱偟傑偄傑偡丅丂怓乆帋峴嶖岆偟偨寢壥丄屢娭愡傪屌掕偟偰丄巟帩揰傪拞怱偵嵍塃偵梙傟傞傛偆偵偡傟偽曗惓抣傪壛偊傞偩偗偱偦偙偦偙曕偗傞傛偆偵偼側傝傑偟偨丅丂偱偡偑丄峫偊傞偲慜屻摦嶌偼屢娭愡傪嫬偵忋懱偼屌掕偟偰懌偩偗偑摦偄偰偄傞忬懺偱偡丅丂偦傟偵曕偗傞偲偼偄偭偰傕寁嶼抣偳偍傝偱偼側偔曗惓抣傪戝偒偔壛偊偰偄傞傢偗偱偝偭傁傝僟儊側傢偗偱偡丅丂曗惓抣偑昁梫側棟桼偲偟偰偼堦揰幙検偱偼側偔丄暘晍幙検偱偁傞偐傜丄幙揰偼惷巭廳怱偱偼側偔丄憡摉扨怳巕偱嶼弌偝傟傞埵抲偵側傞偲偐丄慜恑偺崉惈偑掅偄偐傜偩偲偐怓乆偲峫偊偰偍傝傑偟偨丅
偦偺拞偱傕丄儘儃僢僩偼搢棫怳巕偱偼側偔丄擇廳搢棫怳巕偱寁嶼偡傋偒偩偲偄偆偙偲偑偁傝傑偡丅懌偑堦偮偺怳巕偱丄屢娭愡偐傜忋偼暿偺怳巕偑媡偵梙傟偰偄傞偲偄偆僀儊乕僕偱偡丅懌偺怳傟傪憡嶦偡傞傛偆偵媡偵怳傟偽忋敿恎偑夞揮偟側偄傛偆偵尒偊傞偲偄偆偙偲偱偡丅
偦傟偱搢棫怳巕偲擇廳搢棫怳巕傪斾傋偰傒傑偟偨丅伀
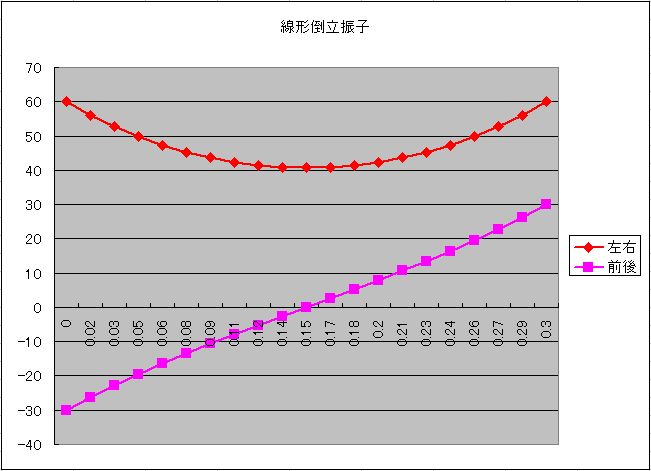
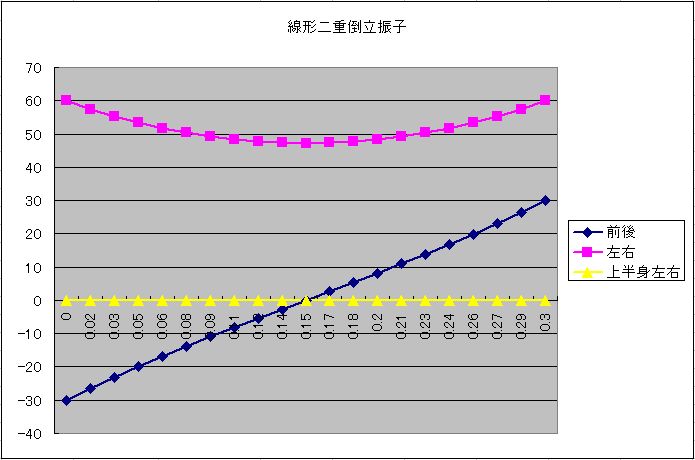
僷儔儊乕僞偑揔摉側偺偱傑偩傢偐傝傑偣傫丅丂曗惓抣傪擖傟偰偄側偄寁嶼寢壥偱斾傋偰偄傑偡丅
擇廳搢棫怳巕偺曽偑怳傟暆偑庒姳彫偝偄偺偱偡偑丄偙傟偱傕傑偩偡偭旘傃偦偆側姶偠偩側丅偳偪傜傕廳怱埵抲偼惷巭廳怱傪憐掕偟偰偄傞偺偱丄偙傟傪憡摉扨怳巕偱寁嶼偡傟偽峏偵寢壥偼偄偄曽岦偵曄壔偡傞偼偢丅擇廳怳巕偺曽偼忋敿恎傪怳傞偙偲偱壓敿恎偺怳傟暆傪墴偝偊傞帠傕壜擻偱偡丅丂忋偺恾偱偼忋敿恎偼怳傟側偄傛偆偵偟偰偄傑偡丅
寁嶼幃偼偙偪傜傪嶲峫偵偝偣偰偄偨偩偒傑偟偨丅乽Reseach乿偺拞偺帒椏偵徻偟偔彂偐傟偰偄傑偡丅
丂
崱擔偺婣傝偵乽OpenCV僾儘僌儔儈儞僌僽僢僋乿傪扵偟偵杮壆傔偖傝傪偟偰偒傑偟偨丅丂偑丄寢壥偼柍廂妌丅丂偳偙偵傕攧偭偰傑偣傫偱偟偨丅丂嶐擔尒偮偗偨捠斕傕婣偭偰偐傜尒傞偲乽攧傝愗傟乿丅丂傑偄偭偨側乕偲巚偭偨傫偱偡偑丄杮偺栚師傪傛偔傛偔尒傞偲丄夝愢偝傟偰偄傞夋憸張棟娭楢偺撪梕偭偰寢峔婎慴揑側帠偟偐庢傝忋偘傜傟偰偄傑偣傫丅偦傟偔傜偄側傜変偑壠偵偁傞憼彂孮偱僇僶乕偱偒偦偆偱偡丅丂儕僼傽儗儞僗偲僒儞僾儖僜乕僗偼僱僢僩偐傜棊偲偣傞偺偱丄杮傪攦偆昁梫偼側偄偱偡偹丅丂偪側傒偵JBOOK側傜嵼屔偁傝偦偆偱偡丅梫偼弌斉幮偲捈寢偺僱僢僩捠斕偼慡柵側傫偱偡偑丄杮壆偝傫偼嵼屔偲偟偰帩偭偰偄傞偺偱丄偁傞偲偙傠偵偼偁傞傫偱偡偹丅丂嵼屔偑偁傝偦偆側偺偼暥嫵摪偩偗偱偟偨偗偳丅
 丂儔儉僟偵捦傑傟傞傕偺偨偪
丂儔儉僟偵捦傑傟傞傕偺偨偪
墿怓偺傾僸儖偪傖傫偼儔儉僟偺栚偵偼崌傢側偔偰丄儔儀儕儞僌偟偵偔偦偆側偺偱丄儔儉僟偵尒偊偦偆偱偮偐傔偦偆側傕偺傪庢傝懙偊偰傒傑偟偨丅丂僺僢僋傾僢僾偝傟偰偔傟乣丅
仭俋寧侾俈擔仭
擇廳搢棫怳巕偺懕偒丅
憡摍扨怳傝巕偺榬偺挿偝傪寁嶼偡傞偵偼姷惈儌乕儊儞僩傪寁嶼偣偹偽側傝傑偣傫丅丂姷惈儌乕儊儞僩偺嶼弌娭悢偼埲慜偵嶌偭偰偄偨偺偱偡偑丄偳偆傗傜摲懱巔惃傪峫椂偟偰偄側偄婰弎偵側偭偰偄傞傜偟偄丅丂帺暘偱彂偄偨僾儘僌儔儉偑棟夝偱偒側偐偭偨傝偟偰丄偁傟丠傕偟偐偟偰偙傟寁嶼傓偪傖偔偪傖偩偭偨偺偱偼丠偲偐巚偄傑偟偨偑丄妋擣偟偨寢壥偳偆傗傜惓偟偄傜偟偄丅丂偦偟偰壗搙偐偺姩堘偄偺枛偵弨旛偱偒偨偺偱偄偞寁嶼両
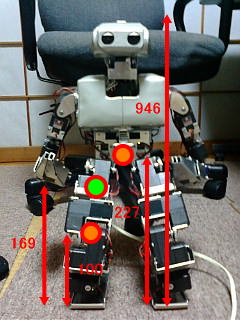 丂僆儗儞僕偺娵偑惷巭廳怱丄丂椢偺娵偑憡摍扨怳巕偺幙揰
丂僆儗儞僕偺娵偑惷巭廳怱丄丂椢偺娵偑憡摍扨怳巕偺幙揰
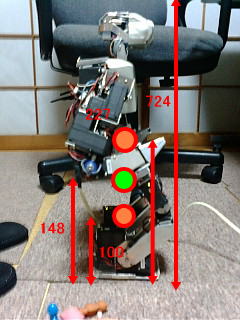
傑偢丄Y幉廃傝偱偺寁嶼寢壥偼丄懌偺廳検偼605g 惷巭廳怱埵抲偼壓偐傜100噊丂丂偙傟偵懳偟偰憡摍扨怳巕偱偼壓偐傜169mm
師偵懌埲奜乮嵍懌傕娷傓乯丂廳検偼2365g丂惷巭廳怱埵抲偼壓偐傜227mm丂倞偙傟偵懳偟偰憡摍扨怳巕偱偼壓偐傜側傫偲丄946mm丂夋憸偵擖傝傑偣傫偱偟偨丅
傎傫偲偐側乕偲巚偆傫偱偡偑丄屢娭愡傪屌掕偟偨曕峴偱偺帋峴嶖岆偺曗惓抣偼+200mm偔傜偄偩偭偨偺偱丄廳怱埵抲450mm偔傜偄偱摦偐偟偰偄傑偟偨丅偦傟傪峫偊傞偲偁側偑偪奜偟偰偄側偄偐傕丅
丂
師偵X幉傑傢傝
 丂僆儗儞僕偺娵偑惷巭廳怱丄丂椢偺娵偑憡摍扨怳巕偺幙揰
丂僆儗儞僕偺娵偑惷巭廳怱丄丂椢偺娵偑憡摍扨怳巕偺幙揰
懌偺廳検偼605g 惷巭廳怱埵抲偼壓偐傜100噊丂傕偪傠傫偝偭偒偲摨偠丅丂丂偙傟偵懳偟偰憡摍扨怳巕偱偼壓偐傜148mm丂
懌埲奜偺憡摍扨怳巕偱偼壓偐傜724mm
姷惈儌乕儊儞僩偑曄傢傞偺偱憡摍扨怳巕偺榬偺挿偝傕曄傢傝傑偡丅丂廳怱傪忋偵偟偨曽偑偄偄偩傠偆偲偄偆偙偲偱庤傪崢曈傝偵峔偊偰偄傞偺偩偑丄偙傟偑姷惈儌乕儊儞僩傪戝偒偔偡傞寢壥偲側偭偰偄傞傛偆偩丅丂X幉廃傝偱偼屢娭愡晅嬤偵庤偑埥傞屄僩儞側傞偺偱姷惈儌乕儊儞僩傪戝偒偔偡傞摥偒偼柍偄偺偱憡摍扨怳巕偺榬偺挿偝傕偦偺暘抁偔側偭偰偄傞偲偄偆偙偲偩傠偆丅
偙偺寢壥傪搢棫擇廳怳巕偺寁嶼偵揔梡偡傞偲丄
嶐擔丄揔摉偵僷儔儊乕僞傪擖傟偨応崌傛傝峏偵傆傝暆偑彫偝偔側偭偰偄傞丅丂側傫偩偐偙傟偼婜懸偱偒偦偆偩側乕丅
偪側傒偵丄僷儔儊乕僞偼Y幉廃傝偺寢壥傪巊偭偰偄傑偡丅X幉廃傝偺僌儔僼偼傎偲傫偳捈慄側偺偱丄偙偺掱搙偺悢抣嵎偩偲僌儔僼偵嵎偼偱傑偣傫偺偱丅丅
仭俋寧侾俉擔仭
擇廳搢棫怳巕婳摴偱偺曕峴丅
嶐擔偺寁嶼寢壥偱偼偄偄姶偠偺摎偊偑弌偨偺偱丄曕峴偝偣偰傒傞傋偔婳摴寁嶼傪儔儉僟偵慻傒崬傓丅
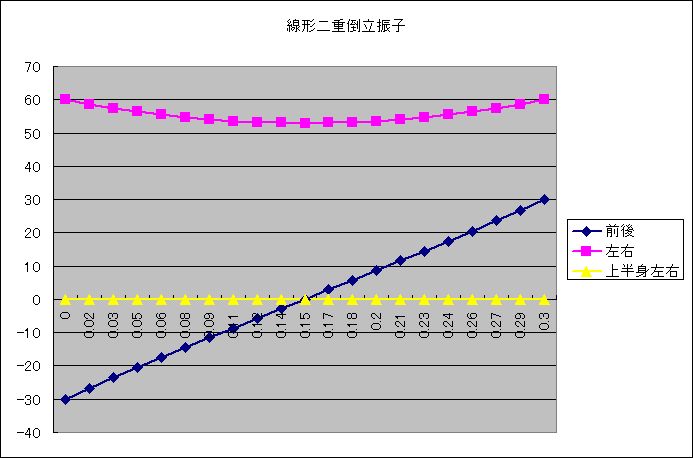
嶲峫偵偟偨榑暥偱偼忋敿恎傪嵍塃偵怳傞偙偲偱崢偺怳暆傪梷偊傞偲偄偆偙偲傪傗偭偰偄傞偺偩偑丄偙偺峫椂傪擖傟偰偄傞娭悢偼丄懌偺僗僞儞僗傪曄偊傜傟側偄丅丂巔惃傪曄峏偡傞嵺偵偡傝懌偱偼側偔丄懌傪忋偘偰僗僞儞僗傪曄偊傞偲偄偆摦嶌傪峴偄偨偄偺偱僗僞儞僗傪曄偊傜傟側偄偺偼偪傚偭偲僀儎丅
寢嬊丄忋敿恎傪嵍塃偵怳傞幚憰偼掹傔偰丄慜屻曽岦偺擇廳搢棫怳巕偺娭悢傪嵍塃偵傕揔梡偡傞偙偲偱僗僞儞僗傕曄偊傜傟傞偙偲偲偟偨丅
曕偐偣偰傒偨偲偙傠丄曗惓側偳偼側偔偰傕曕偗傞姶偠丅丂僷儔儊乕僞挷惍側偳傪偟偰傒側偄偲埨掕搙偼敾傜側偄偑丄搢棫怳巕傪巊偭偨曕峴傛傝偼曕暆偑戝偒偔庢傟偦偆側梊姶偩丅
擇廳搢棫怳巕偲憡摍扨怳巕丅丂偙偺慻傒崌傢偣偵摎偊偑偁偭偨偺偐乣丅丂偆傟偟乣丅
偄傑傑偱偼弌棃側偐偭偨慗堏帪娫0.6昩偲偐偱傕曕偗偦偆丅偙傟偱傕偭偲戝屢偱偁傞偗傟偽偡偛偔婐偟偄偺偩偑丅
僷儔儊乕僞傪怓乆曄偊偰曕偐偣偰偄偨傜丄側傫偩偐婲偒忋偑傝偑傑偨偱偒側偔側偭偰傞丅側傫偱偩丠丠丠丂偲尒偰傒傞偲丄榬偺嬥嬶偑偪偓傟偰傞丅丂儔儉僟偑摦偒巒傔偰偪傚偆偳俁擭丅僗僺乕僔乕僘儘儃僢僩僉僢僩傪攦偭偰偐傜偼傕偆俁擭敿偔傜偄偵側傞丅丂怓乆僈僞偑弌偰傕偍偐偟偔側偄擭崰側傫偩側乣丅
榬偺嬥嬶丄搚梛擔偵捈偟傑偡丅
仭俋寧侾俋擔仭
曕峴僷儔儊乕僞偺挷惍傪傗傝偨偄偲偙傠偩偑丄榬偑夡傟偰偄傞偺偱崱擔偼偱偒側偄丅丂戙傢傝偵丄庴摦娭愡偺幚尡傪傗偭偰傒偨丅
擇懌曕峴儘儃僢僩偑晄惍抧傪曕偔偲偒丄梀媟偑愙抧偟偨偲偒偵抧柺偵曧傢側偗傟偽側傜側偄丅偙偺丄曧偆娭愡偑庴摦娭愡側偺偩偑丄擇懌曕峴儘儃僢僩側偺偱懌庱偑偔偨偔偨偩偲棫偰側偄丅丂偦偺偨傔丄摨偠娭愡偱庴摦娭愡偲擻摦娭愡傪愗傝懼偊傜傟側偗傟偽側傜側偄丅
娙扨偵偼弌棃偦偆偵側偄偺偩偑丄僒乕儃傪憖嶌偡傞廃婜傪偼傗乕乕乕偔偡傟偽偱偒傞傫偠傖側偄偐偲巚偊偰偒偨偺偱偪傚偭偲幚尡偡傞偙偲偵偟傑偟偨丅丂傑偢偼庴摦娭愡偺幚尡丅偨偩扨偵楬柺偵曧偭偰娭愡偑摦偔偩偗側傜偽僒乕儃傪愗偭偰偍偗偽偄偄傫偩偗偳丄擻摦娭愡偵愗傝懼偊傞嵺偵楬柺偵曧偭偨傑傑偺忬懺偵側傞傛偆偵偡傞偵偼娭愡妏搙傪忢偵攃埇偟偰偍偔昁梫偑偁傝傑偡丅
儔儉僟偺僾儘僌儔儉偼僔僌僫儖傪巊偭偨妱傝崬傒偱摦偄偰偄傞偺偱丄偁傑傝廃婜傪憗偔偡傞偙偲偑偱偒傑偣傫丅1偮偺僒乕儃偵懳偟偰妏搙偺庢摼偲妏搙偺愝掕傪僶僔僶僔偲傗傞偺偱嵟懍偩偲2ms偔傜偄偺廃婜偱偺摦嶌偑壜擻側偼偢偩丅丂偦偺偨傔偵偼妱傝崬傒側偧巊傢偢偵while( )儖乕僾偱柦椷傪幚峴偟丄usleep( )偺帪娫傪挷惍偟偰摨偠廃婜偱柦椷偑幚峴偱偒傞傛偆偵偟傑偡丅
帋偟偨偲偙傠丄僐儞僾儔僀傾儞僗僗儘乕僾傪偆傑偔巊偊偽庴摦娭愡偭傐偔偼側傞傫偩偗偳丄偪傚偭偲懍搙偑抶偄丅僩儖僋傪敳偄偰丄妏搙偩偗娔帇偟偨曽偑偄偄偺偐丄偪傚偭偲柪偆偲偙傠丅丂偨偩偟丄僩儖僋傪敳偔偲挼偹曉傝偑弌偰偟傑偭偰椙偔側偄丅丂惂屼廃婜偼2ms偱傕摦嶌偡傞傫偩偗偳丄10ms偔傜偄傑偱偼姶妎揑偵偼嵎偑柍偄丅15ms偵側傞偲偪傚偭偲僑僣僑僣偡傞姶怗偑偁傞丅傕偆彮偟専摙偡傞昁梫偑偁傞偑丄曕偔懍搙偵斾傋傞偲斀墳懍搙偑抶偡偓傞姶偠丅丂傕偭偲斀墳傪憗偔偡傞岺晇偑昁梫偩丅
仭俋寧俀侽擔仭
崱擔偼挬偐傜杮摉偵挘傝愗偭偰嶌嬈傪奐巒丅丂傑偢偼嶐擔偺庴摦娭愡偺懕偒丅
楬柺偵曧偄側偑傜傕僩儖僋傪梌偊偨偄偭偰偙偲偱丄僐儞僾儔僀傾儞僗僗儘乕僾傪巊偭偰奜椡偵斀墳偡傞傛偆偵偟偰偄傞偺偩偑丄幚娭愡妏搙偵廬偭偰愝掕妏搙傪曄偊偰傕僗儘乕僾愝掕偺偍堿偱斀墳偑撦偄偺偱偼丄丂偲偄偆慜採偱摦嶌偝偣偨偄曽岦偵偼僗儘乕僾偑媫側棫偪忋偑傝偵側傞傛偆偵僾儘僌儔儉丅
婔暘偐偼僗儉乕僘偵摦偔傛偆偵側偭偨偺偩偑丄傑偩傑偩廳偄丅
僷儞僠愝掕側傫偐傕摦堳偟偰怓乆帋偟偨偺偩偑丄嵺棫偭偨惉壥偼側偟丅
丂
擔傕悘暘崅偔側偭偨偲偙傠偱丄堦嶐擔偪偓傟偨榬偺晹昳偺惢嶌偵庢傝妡偐傞丅丂儔儉僟偺僼儗乕儉偼慡懱揑偵嫮搙偵婡傪巊偭偨愝寁傪偟偨偮傕傝偩偑丄偪偓傟偨晹昳偼栚棫偭偰庛偦偆丅丂偪傚偭偲傗偦偭偲偠傖偪偓傟側偄宍忬偵偟偰傒偨丅丂偦偺暘嬋偘傞偺偑擄偟偔側偭偨偺偩偑丅
榬傕帯偭偨偺偱婲偒忋偑傝儌乕僔儑儞傪偝偣偰傒偨傜婲偒忋偑傟側偄丠偁傟偁傟丠丠偲巚偭偰壗搙傕傗偭偰傞偲婲偒忋偑傟傞傛偆偵側偭偰偒偨丅丂僒乕儃偑傊偨傜側偄偲偩傔側傫偩側丅丂(^^乁丂忣偗側偄儌乕僔儑儞偩丅(^_^;)
丂
偝偰師偼丄SEMB偺僀儞僞乕僼僃僀僗儃乕僪傪嶌傠偆偐偲巚偭偰偄偨偺偩偑丄偪傚偭偲傢偒傒偪偵堩傟偰C7儃乕僪偺Linux傪棫偪忋偘偰傒偨傝偟偨丅丂偦傠偦傠OpenCV傪僀儞僗僩乕儖偟偰夋憸擣幆傪偝偣偰傒偨傝丄壒惡擣幆傪偝偣偨傝偡傞偭偰偺傪傗傝巒傔傛偆偲巚偭偰偄傞偺偩丅
偦偆偄傗丄丄丂CF僇乕僪偵僀儞僗僩乕儖偟偨庤弴偭偰偡偭偐傝朰傟偰偟傑偭偨側丅偳偭偐偵儊儌偭偰側偄偐側乕偲巚偭偰扵偟偨偺偩偑丂側偄丂丅丅丂偆偆傓丅丅傑偨摨偠嬯楯偟側偒傖側傜側偄偺偐側乕丅丂偦傟傛傝丄HDD偵僀儞僗僩乕儖偟偨曽偺DebianLinux偼X傕僀儞僗僩乕儖偝傟偰偄傞偺偩偑丄C7梡偵攦偭偨拞屆偺塼徎僨傿僗僾儗僀偩偲夝憸搙偑崌傢側偄丅
僀儞僗僩乕儖偟偨偲偒偼儊僀儞PC偺僨傿僗僾儗僀傪巊偭偨偺偩偑丄偙傟偵崌傢偣偨僐儞僼傿僌儗乕僔儑儞偵側偭偰偟傑偭偰偄傞丅丂偙傟傪廋惓偟傛偆偲偟偨偺偩偑丄傗傝曽偑傢偐傜側偔偰丄丄丂偦傟傛傝儖乕僩偺僷僗儚乕僪傪朰傟偰偟傑偭偰偄傞丅丂傫乣丄戝懱偄偮傕摨偠傛偆側僷僗儚乕僪偵偟偰傞偐傜摉偨傞偼偢側傫偩偗偳丄傢偐傜側偄丅丂婥帩偪偑埆偔側傞偔傜偄帋偟偨偲偙傠偱掹傔偰CF偐傜棫偪忋偘偰僷僗儚乕僪傪柍棟傗傝徚偡偙偲偵偟偨丅憗偔偦偆偡傝傖傛偐偭偨傫偩偗偳丅丅丅丂偦偟偰儘僌僀儞偟傛偆偲偟偨偲偙傠丄傗偭傁傝偱偒側偄丅丅丂偦偟偰偦偺屻偵gdm偺僌儔僼傿僇儖儘僌僀儞偺愝掕偼root偱偼儘僌僀儞偱偒側偄傛偆偵側偭偰偄偨偺偱偟偨丅偑偭偔傝丅丅
偦偺忋寢嬊X偺嵞愝掕偼偆傑偔偄偐偢丄忣偗側偄偙偲偵OS偐傜嵞僀儞僗僩乕儖偡傞偙偲偵偟傑偟偨丅
Linux偱奐敪娐嫬傪峔抸偟偨偄傫偩偗偳丄昁梫側僣乕儖偲愝掕偑偝偔偭偲僀儞僗僩乕儖偱偒傞僷僢働乕僕偭偰側偄傫偱偡偐偹丠丂Linux巊偭偨偙偲側偄傫偱傢偐傜傫偱偡丅
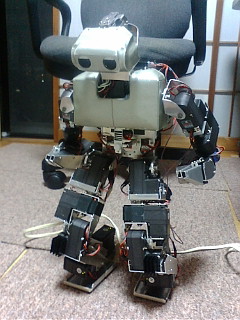 丂擇廳搢棫怳巕偱曕偔儔儉僟偺巔丅丂嶣塭帪偼巭傑偭偰偨傫偩偗偳偹丅
丂擇廳搢棫怳巕偱曕偔儔儉僟偺巔丅丂嶣塭帪偼巭傑偭偰偨傫偩偗偳偹丅
曕峴僷儔儊乕僞偺挷惍丅
偪傚偭偲曕偐偣傞偲偡偖偵旼偑擬偱棊偪偰偟傑偆偺偱丄曻擬斅傪偮偗偰傒偨丅丂
 丂偐偭偙傢傝乕
丂偐偭偙傢傝乕
偐偭偙埆偄偗偳丄岠壥偼廫暘丅丂偱傕偙偗傞偲偡偖偵奜傟偰偟傑偄傑偡丅丂旼偺棤懁偵庢傝晅偗傞傛偆偵峫偊偰傒傛偆丅
 丂夋憸拞墰偑嶌傝捈偟偨嬥嬶丅丂嬋偘傞偺偵嬯楯偟傑偟偨丅
丂夋憸拞墰偑嶌傝捈偟偨嬥嬶丅丂嬋偘傞偺偵嬯楯偟傑偟偨丅
丂
柧擔偼SEMB偐傜僗僞乕僩偺梊掕丅
仭俋寧俀侾擔仭
崱擔偼SEMB偐傜僗僞乕僩偺偼偢偩偭偨偑丄曕峴埨掕壔偺偨傔偵懌棤偺夵椙偐傜僗僞乕僩丅丂挬丄晍抍偺拞偱傗偭偰傒傛偆偲巚偄棫偭偨偺偩丅巚偄棫偭偨偑媑擔丅
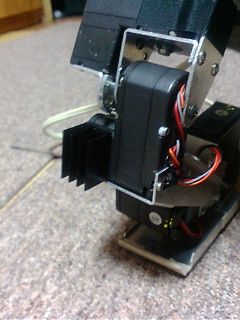
 丂丂偮傑愭懁偼僄儔僗僩儅乕丄偐偐偲懁偼僾儔僶儞
丂丂偮傑愭懁偼僄儔僗僩儅乕丄偐偐偲懁偼僾儔僶儞
懌棤傪僌儕僢僾偝偣偰埨掕曕峴偝偣傞偵偼傑偩怓乆懌傝側偄丅偐偐偲傪僗儕僢僾懌偵偟偰偮傑愭忋偘婥枴偱梀媟暅婣偝偣偰傒傞丅丂僾儘僌儔儉偼傑偩丅
師偵庤偑偗偨偺偼C7偺揹尮働乕僽儖偺攝慄廋惓丅丂C7傕偄偮傑偱傕婎斅傓偒弌偟偩偲偄偮偐帠屘偑婲偙傞偐傜働乕僗偵擖傟偨偄丅丂C7梡偵攦偭偰偒偨挻彫宆ATX揹尮偺働乕僽儖傪C7偺揹尮働乕僽儖偵捈晅偗丅丂揹尮崬傒偺戝偒偝偑働乕僗偺戝偒偝偵側傞梊掕丅丂僐僱僋僞攝慄偵偡傞偮傕傝偑丄嶌嬈拞偵僐僱僋僞偺僺儞偑愜傟偰偟傑偄丄傗傓側偔捈晅偗偵丅

僗僩儗乕僕梡偺揹尮僐僱僋僞傕丄晛抜偼昁梫側偄偺偱愗傝棧偣傞傛偆偵偟偨丅

師偵SEMB偺儁儕僼僃儔儖儃乕僪偵庢傝妡偐偭偨偺偩偑丄傑偢晹昳忣曬傪惍棟偟偰丄僲乕僩偵夞楬恾傪彂偔丅丂昁梫側僐僱僋僞偲僐僱僋僞偺攝抲傪寛傔偰丄晹昳傪攝抲偟偰偄偔丅
3.3V宯偲5V宯偑崿嵼偟偰偄傞偺偱偙傫偑傜偑傝偦偆丅傑偩幚尡抜奒側偺偱3.3V偼SEMB偐傜傕傜偭偰偔傞偙偲偵偟傑偟偨丅梕検懌傝側偄偭偰偙偲偼側偄傛偹丠偒偭偲丅
偦偟偰丄挷傋暔偟偨傝丄偼傫偩晅偗偟偨傝偟側偑傜Linux僇乕僱儖偺嵞峔抸傪傗偭偰傒傞丅丂僨傿僗僩儕價儏乕僔儑儞偺僇乕僱儖偼慡晹擖傝側傫偱偱偐偄偟棫偪忋偑傞偺偵帪娫偑偐偐傞丅傕偆偪傚偭偲僽乕僩帪娫傪抁偔偟偨偄偺偱昁梫側偄傕偺傪偦偓棊偲偟偨偄偺偩丅
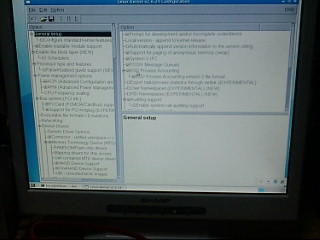 丂偙傟偑丄僇乕僱儖偺僐儞僼傿僊儏儗乕僔儑儞夋柺丅丂xconfig
丂偙傟偑丄僇乕僱儖偺僐儞僼傿僊儏儗乕僔儑儞夋柺丅丂xconfig
壗偑嶍傟傞偺偐嶍傟側偄偺偐傢偐傜傫丅(^_^;)丂丂偪側傒偵奐敪娐嫬偼apt-get偭偰僐儅儞僪偱傃偟偽偟僀儞僗僩乕儖偟偲傝傑偡丅丂傑偩丄HDD偱偍帋偟峔抸側偺偱側傫偱傕傾儕偱丅
偦偟偰丄偙傟偑SEMB偵儁儕僼僃儔儖儃乕僪傪偮偗偨偲偙傠丅丂柍懯偵僗儁乕僗偑梋偭偰偄傞傛偆偵尒偊傞偑丄傑偩丄嵟廔揑偵6屄搵嵹偡傞梊掕偺MAX485偲偦傟梡偺僐僱僋僞偑1屄偢偮偟偐忔偭偰側偄丅丂偦偺傎偐丄3幉壛懍搙僙儞僒乕偲偪偭偙偄儅僀僐儞傕搵嵹偡傞梊掕丅CSI偼僐儞僩儘乕儔梡偲偟偰丄儅僀僐儞偲SEMB偺捠怣偼COM傪巊偊偽偄偄偐側丅乮SPI偲COM傪帩偭偰傞儅僀僐儞傪巊偊偽SEMB偺CSI偑嬻偔偹丅偦偭偪偺曽偑偄偄偐側丅丂傑偀丄屻擔峫偊傛偆乯
 丂傗偭傁傝揹尮搳擖偼傃傃傞丅夡傟側偔偰傛偐偭偨(>_<)
丂傗偭傁傝揹尮搳擖偼傃傃傞丅夡傟側偔偰傛偐偭偨(>_<)
偱傕丄偙傟偼傑偩揹尮夞楬偟偐攝慄偑姰椆偟偰傑偣傫丅懕偒偼柧擔丅
仭俋寧俀俀擔仭
崱擔偼暯擔側偺偩偑丄帺桼庢摼偺壞媥傒俀擔栚偲偟偨偺偱係楢媥侓(^丒^)
嶐擔偺擔帍傪彂偄偨偁偲丄懌棤傪曄峏偟偨儔儉僟傪乮僾儘僌儔儉傪曄峏偟側偄偱乯曕偐偣偰傒偨偺偩偑丄曕偐側偄偙偲偙偺忋側偄丅丂懌棤偺屻敿暘乮埲壓乯傪僗儕僢僾偵偟偨偙偲偱偗傝懌偑棙偐側偔側偭偰偟傑偭偨丅丂偦偺応偱懌摜傒傪懕偗偰偄傞姶偠丅媡偵丄偙側偄偩傑偱偆傑偔曕偗側偐偭偨屻戅曕峴偑偱偒傞傛偆偵側傝傑偟偨丅(^^乁
偮傑傝丄嫲傜偔偮傑愭懁傪僗儕僢僾偵偟偰偐偐偲懁傪僌儕僢僾偵偡傟偽曕偗傞傛偆偵側傞婥偑偡傞偺偩偗傟偳丄偦傟偠傖堄枴偑柍偄丅丂恖娫偺応崌偗傝懌偼偮傑愭晹偱廟偭偰偄傞偑丄捠忢偺儘儃僢僩偼偐偐偲傕拝偄偰偄傞偺偱帠忣偑堘偆傫偩側丅丂曕偒巒傔偵偮傑愭晹偵廳怱傪堏偡傛偆偵偟偰僌儕僢僾偟傗偡偔偟偰傒傛偆丅
慗堏帪娫偑抁偄偲偦偺傛偆側忬嫷側偺偩偑丄慗堏帪娫傪0.6昩偔傜偄偵挿偔偡傞偲偙傟偱傕曕偔丅丂懍搙偑抶偄偲僌儕僢僾偱偒傞偭偰帠偱偡偹丅
偦傟偱傕堦墳偼僌儕僢僾懌側偺偱丄偢偭偲曕偐偣傞偲嵍塃摦嶌偺摨婜偑偢傟偰偒偰偦偺偆偪墶偵悂偭旘傇丅怳巕側偺偩偐傜偦偺怳巕偵懳偡傞怳巕廃婜偑寛傑偭偰偄傞偼偢偱丄偦偺廃婜偱曕偐偣傛偆偲偡傞側傜偽丄偦傟偵墳偠偨憡摍扨怳巕偵側傞傛偆偵巔惃傪曄峏偟側偗傟偽側傜側偄偟丄丂巔惃偑寛傑偭偰偄傟偽偦偺巔惃偵揔偟偨廃婜偱曕偐偹偽側傜側偄偼偢偩丅丂堦娽儗僼僇儊儔偺僔儍僢僞乕懍搙桪愭偲峣傝桪愭傒偨偄側姶偠丠丂偙偙傫偲偙傕傕偆彮偟巇慻傒偑偄傝偦偆偩丅
崱擔偼屵慜拞偐傜SEMB偺儁儕僼僃儔儖儃乕僪偺攝慄丅

侾夞楬偩偗慻傫偱丄偦偺屻偵働乕僽儖攝慄傕侾夞楬暘偩偗廔傢傜偣傑偟偨丅丂埲慜偵徯夘偟偨彫偝偄僐儞僞僋僩梡偺埑拝岺嬶姅幃夛幮ENGINEER偺惛枾埑拝儁儞僠PA-09偱SEMB偺僐僱僋僞僐儞僞僋僩偺埑拝偱偒傑偟偨丅ZH宆僐僱僋僞傛傝僼傿僢僩偟偰偄傞姶偠偱偡丅丂偱傕丄彫偝偔偰嶌嬈偼戝曄丅丂帺暘偑丄乽庤愭偑婍梡側恖乿偵暘椶偝傟傞偲巚偭偰偄傞恖側傜側傫偲偐嶌嬈偱偒傞偱偟傚偆丅
偝偰丄夞楬傕僥僗僩偡傞暘偼慻傔偨偟捠揹帋尡偟偰傒傑偟傚偆丅丅丂丒丒丒壗偐偍偐偟偄丅俁丏俁倁弌偰偄傞偼偢偺抂巕偵俀丏俆倁偟偐弌偰偄側偄丅丂SEMB傊偺嫙媼揹埑俆V傕俀丏俆V偵側偭偰偄傞丅偁傟傟丠僔儑乕僩偟偨偐丠丂偲巚偭偨偑丄俆V偺儗僊儏儗乕僞偑偲偰偮傕側偔擬偔側偭偰偄傞丅丂偳偆傕夁忚嫙媼偱揹埑崀壓傪婲偙偟偰偄傞傜偟偄丅丂SEMB偺僪僉儏儊儞僩傪挷傋傞偲SEMB偺徚旓揹棳偼俈V帪偵600mA傜偟偄偺偱5V偩偲侾俙偔傜偄丅丂偓傝偓傝娫偵偁偆偼偢偩偗偳丄丄丄丂傑偀偄偄傗丄SEMB傊偺嫙媼揹埑傪俋V傑偱忋偘傑偟偨丅丂偦偺偨傔丄儁儕僼僃儔儖儃乕僪偵昁梫側俆V傪暿搑嶌傞偙偲偵側偭偰偟傑偭偨丅丂懡揹尮偺儃乕僪偼椙偔側偄側偀丅丂
崱擔偼梉曽偐傜弌偐偗傞偙偲偵側偭偰偄偨偺偱嶌嬈偼偙偙傑偱丅SEMB偺懕偒偼柧擔傊丅丂僴乕僪嶌惢偼傗偨傜偲庤娫偑偐偐傞偐傜堦婥偵嶌傝忋偘偰偟傑偄偨偄側乕丅
仭俋寧俀俁擔仭
曕峴偺専摙傪傗傝偨偄偲偙傠偩偑丄偖偭偲変枬偟偰SEMB儁儕僼僃儔儖儃乕僪傪恑傔傞丅
RS485偑侾夞楬姰惉偟偨偲偙傠偱丄僾儘僌儔儉傪嶌偭偰摦嶌傪妋擣偟傑偡丅丂偲偄偭偰傕SEMB偱僾儘僌儔儉傪嶌傞偺偼弶傔偰丅丂偙偆偄偆椶偺儁儕僼僃儔儖LSI傪憖嶌偡傞傕偺偭偰ATMEGA傕偦偆偩偗偳丄儗僕僗僞憖嶌偑柺搢偱側偐側偐僾儘僌儔儉偑恑傑側偄丅乮傢偐偭偰偟傑偆偲娙扨側傫偩偗偳丅丅乯丂偲偭傁偟偐傜堷偭偐偐傞偺偼偄傗側偺偱LED傪揰柵偝偣傞偙偲偐傜巒傔傞丅丂幚偼偙偺LED傪搵嵹偡傞偺偵堦嬯楯偟偰丄丂LED偺嬌惈偑娫堘偊偨乣佀LED晅偗懼偊偨偗偳岝傜側偄?佀傾乕僗偑僀儌偼傫偩偵側偭偰偨佀H儗儀儖偱岝傞傫偠傖側偔偰L儗儀儖偱岝傜偝側偒傖佀偓傖乕IO芜澳偼3.3V宯偩偭偨乮LED偵5V嫙媼偟偰偨乯佀3.3V側傜掞峈傕偭偲彫偝偔偟偨傎偆偑偄偄偐丠丂偲偄偆偲偭偪傜偐偭偨忬懺偐傜巒傑偭偨偺偩偗偳丄丂丒丒丒LED偑岝傜側偄傫偱偡丅(>_<)丂佀丂埬偺掕儗僕僗僞愝掕傪堦偮朰傟偰傑偟偨丅丂偭偰側姶偠偱埫塤棫偪崬傔傞僗僞乕僩偲側傝傑偟偨丅
堦斣娙扨側偼偢偺IO億乕僩偺憖嶌偑堦斣庤娫庢偭偰丄RS485偺曽偼斾妑揑偡傫側傝偲恑峴偟傑偟偨丅
RS485偼敿擇廳捠怣側偺偱丄SEMB偺帩偭偰偄傞1wiredUART偱廫暘側偼偢丅SEMB偼32億乕僩偁傞PWM僒乕儃惂屼慄偺偆偪8杮傪UART偲偟偰巊偊傑偡丅偦傟傕丄8杮傪 1wireUART亊8 偐 2wireUART亊4 偳偪傜偱傕慖傋傑偡丅乮1wire偲2wire偺暋崌愝掕傕偱偒傑偡乯丂崱夞偼6杮傪1wireUART偵偟偰僒乕儃偲偺捠怣偵丄2杮傪僙僢僩偱2wireUART偵偟偰儅僀僐儞偲偺捠怣偵摉偰傛偆偲巚偭偰傑偡丅
崱擔偼RS485偲偡傞1wireUART偺摦嶌妋擣丅
崱偺儔儉僟偺CPU偱偁傞RPU-100傪懳岦憰抲偵偟偰RS485捠怣偺僥僗僩傪偟偨偲偙傠丄偦傟傜偟偄捠怣偼弌棃偰傞姶偠丅丂偨偩丄偪傖傫偲撏偐側偄偺偼僾儘僌儔儉偺偣偄偐丠丂偳偆傕庴怣偑偍偐偟偔偰丄1byte偱傕庴怣偟偨傜丄偄偔傜庴怣儗僕僗僞傪撉傒弌偟偰傕FIFO偑僇儔偵側傜側偄丅丂偍偐偟偄側乣丠丠丠丂偲偄偆忬懺偑挿乕偔懕偄偨偺偱偡偑丄傕偟偐偟偰丄UART偑1wire偺儌乕僪偵側偭偰傕憲庴怣偺攔懠張棟傪偟偰偄側偄偺偱偼丠丂偩偲偡傞偲丄憲怣帪偵偼庴怣億乕僩偼Hi-Z忬懺偲側偭偰偄傞偺偱丄偦傟傪FF偲偐FE偲撉傒庢偭偰傕偍偐偟偔側偄偐傕丠丠丂偙偺峫偊偑惓夝偐偳偆偐傢偐傜側偄偺偩偑丄敿擇廳捠怣丄偦傟傕憡庤偼僗儗乕僽側偺偱慜怗傟側偟偵僨乕僞傪憲偭偰偔傞偙偲偼柍偄偲偄偆慜採偱僾儘僌儔儉傪慻傫偱丄側傫偲偐惓偟偔憲庴怣偱偒傞傛偆偵側傝傑偟偨丅
偱傕偱傕丄偣偭偐偔偺崅懍CPU側偺偵妱傝崬傒僼傽儞僋僔儑儞偑彮側偄偺偱丄UART偺憲怣姰椆傪懸偭偰憲庴怣傪愗傝懼偊偨傝偟側偒傖側傜側偄丅ATMEGA偺USART偩偲FIFO僄儞僾僥傿乕偩偗偠傖側偔丄憲怣姰椆偱妱傝崬傒偑偐偗傜傟偨偺偱懸偮昁梫偑側偐偭偨傫偩偗偳側丅丂偣偭偐偔FIFO偑63byte傕偁傞偺偵堄枴側偄偠傖傫丅奜晹夞楬偱側傫偲偐偟偨偄丅
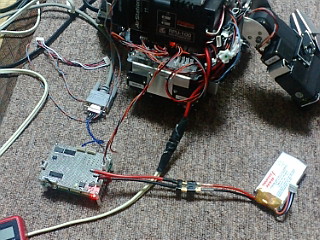 丂RS485捠怣僨僶僢僌偺條巕
丂RS485捠怣僨僶僢僌偺條巕
RS485偑姰惉偟偨偺偱巆傝偺5夞楬偺嶌惢偵偲傝偐偐傠偆偐偲傕巚偭偨偑丄CSI丂傪愭偵傗傞偙偲偵偡傞丅丂嶌傟偽偄偄偩偗偭偰偺偼屻夞偟丅
CSI 偼ATMEGA偱SPI偱帋峴嶖岆偟偨偲偙傠側偺偱斾妑揑傗傝傗偡偐偭偨丅丂SEMB偺PS2僨儏傾儖僔儑僢僋僐儞僩儘乕儔偲偺捠怣僾儘僌儔儉偑壀揷偝傫偺HP偐傜僟僂儞儘乕僪偱偒傞偺偱丄偙傟傪嶲峫偵嵟彫尷昁梫側僾儘僌儔儉傪嶌惉丅丂偙傟傕弶婜愝掕傪堦偮傕傜偟偰偆偛偐偹乕側偀乕偭偰帪娫偑彮偟偁偭偨偗偳丄偝偭偝偲摦偒傑偟偨丅丂傆偂乣丂偼傑傜側偔偰傛偐偭偨丅
 丂CSI捠怣僨僶僢僌偺條巕
丂CSI捠怣僨僶僢僌偺條巕
偁偲偼巆傝偺RS485晹暘傪嶌惢偡傟偽儁儕僼僃儔儖儃乕僪偄偭偨傫姰惉偱偡丅丂憗偔僔僌儅傪晄惍抧曕峴偝偣偨偄丅
仭俋寧俀俆擔仭
堦嶐擔偺擔帍傪彂偄偨屻丄峏偵偑傫偽偭偰巆傝偺RS485晹暘偺偼傫偩晅偗嶌嬈傪傗偭偰傑偟偨丅丂偱偡偑廔傢傜偢丄嶐擔傕巇帠偐傜婣偭偰攝慄嶌嬈傪傗傝傑偟偰丄傗偭偲攝慄傪廔椆偝偣傑偟偨丅
攝慄僠僃僢僋傕堦捠傝傗偭偰丄偝偀捠揹帋尡丅丂6连萑賯爞镽S485傪傂偲偮偢偮僠僃僢僋偟偰偄偭偨偺偩偗偳丄1ch偐傜3ch傑偱偼栤戣側偟丅丂偙偺挷巕偩偲慡偰OK偩側乕偲巚偭偨偲偙傠偑丂4ch偐傜6ch偼斀墳側偟丅丂偁傟偉乣丠丠丂攝慄僠僃僢僋傪嵞搙傗偭偰傕栤戣尒偮偐傜偢丅丂捠揹僠僃僢僋傪傗傝偩偟偨帪揰偱婛偵怺栭偩偭偨偺偱丄偡偖偵巚偄偮偔栤戣丄丂働乕僽儖丄揹尮儔僀儞丄偼傫偩僽儕僢僕側偳傪僠僃僢僋偟偰夦偟偄偼傫偩晅偗傪嵞搙偼傫偩偟捈偟偨傝偟偨偺偩偑丄僟儊丅丂師偺擔傕巇帠偩偟偦偺斢偼掹傔偰偄偭偨傫廔椆丅
堦栭柧偗偰丄憲庴怣愗傝懼偊惂屼偺儔僀儞偺僪儔僀僽擻椡偑栤戣偐丠偲偐峫偊偰僨乕僞僔乕僩傪妋擣偟偨偺偩偑傑偭偨偔栤戣側偟丅
夛幮偱乽摦嶌妋棪俀暘偺侾偩傛偋乣乿偲偐榖偟偰偨傜乽揹尮僠僃僢僋偟傑偟偨偐丠乿偲婎杮揑側偙偲尵傢傟偰乽傑偭偝偒偵傗偭偨傛両乿偲偄偭偨傕偺偺丄傾乕僗抂巕偲揹尮僺儞偱應偭偨側偀偲丄丄揹尮僺儞偲僌儔儞僪僺儞偱應偭偰側偄偲偄偆偙偲偵婥偑偮偄偨丅
偙傝傖丄4ch偐傜6ch偺僌儔儞僪儔僀儞偺崻尦偑僥儞僾儔偼傫偩偱寛傑傝偩側偀偲巚偭偰婣偭偰僠僃僢僋偟偨傜丄3偮偺偆偪1偮偼揹尮僺儞偵偼傫偩晄椙傪敪尒丅(>_<)丂僌儔儞僪儔僀儞偼栤戣側偟丅丂偙傝傖懠偺连萑賯鄟AIC偺偼傫偩晅偗晄椙偭傐偄偭偰偙偲偱堦尒偼傫偩晅偗偱偒偰偄偦偆偩偗偳夦偟偄抂巕傪嵞偼傫偩晅偗丅丂丂嶐擔僠僃僢僋偟偨偲偒偼攝慄懁偺偼傫偩僠僃僢僋偟偐偟偰偄側偐偭偨偺偩丅
偦偟偰愭傎偳俇僠儍儞僱儖偺RS485億乕僩慡偰偺摦嶌傪妋擣偟傑偟偨丅(^_^;)丂栚帇偼傫偩晅偗僠僃僢僋偼擮擖傝偵丅丂僥僗僞乕偱僠僃僢僋偡傞応崌偼僺儞偺崻尦偱僠僃僢僋偟傑偟傚偆丅丂IMD偱嶌偭偰偨帪偼婥偵偟偨偙偲柍偐偭偨傫偩偗偳丄SMD偩偲偙偆偄偆栤戣偑偁傞傫偱偡偹丅丂婥偑偮偒傑偣傫偱偟偨丅
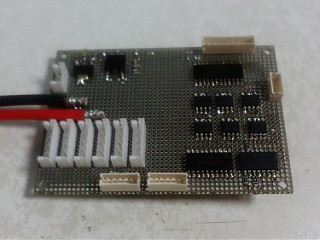 丂丂
丂丂 丂堄奜偲攝慄検偑懡偐偭偨丅
丂堄奜偲攝慄検偑懡偐偭偨丅
僶僢僼傽僠僢僾偑3偮傕忔偭偰傞偗偳丄擇偮偱娫偵崌偄傑偟偨丅丂傑偀丄奼挘偡傞偙偲峫偊偨傜偦偺偆偪巊偆偙偲傕偁傞偱偟傚偆丅
偙傟偱SEMB梡儁儕僼僃儔儖儃乕僪偺戞堦抜奒偼姰惉丅偁偲偼壛懍搙僙儞僒乕偲丄偦傟偺撉傒庢傝梡儅僀僐儞傪搵嵹偡傞偮傕傝偩偗偳丄晛捠偵僔僌儅傪摦偐偡偩偗側傜壛懍搙僙儞僒乕傑偱偼梫傜側偄偺偱屻乆搵嵹偡傞偙偲偵偟傑偡丅
偙偺傑傑SEMB偺僾儘僌儔儉偵撍擖偟偨偄偲偙傠側偺偩偑丄儔儉僟偺曕峴偑婥偵側偭偰巇曽偑柍偄丅丂偁偲彮偟偱寢峔埨掕偟偰曕偗傞傛偆偵側傞梊姶側偺偩丅庴摦娭愡偼僔僌儅偺埆楬曕峴偱庢傝崬傫偱丄壜擻偱偁傟偽儔儉僟偵傕墳梡偟偨偄偲峫偊偰偄傞偺偱僔僌儅偑摦偒弌偟偰偐傜丄偭偰姶偠偐側乕丅
峴摦惗惉傪傗傝偨偄偺偵巚偄偮偔傾僀僥儉偼摦嶌惂屼偽偭偐傝偱偡丅(>_<)
仭俋寧俀俉擔仭
搚梛擔偼擇擔悓偄偱偖偩偖偩偱偁偭偨偺偩偑丄側傫偲偐儔儉僟偺曕峴偵廋惓傪壛偊傞嶌嬈傪傗偭偰傑偟偨丅丂揮搢夞旔曕峴傪幚憰偡傞偨傔偵懌偺巔惃傪丄偮傑愭棫偪傗偐偐偲棫偪偺掕媊傪偟偰丄偦偺忬懺偐傜偱傕搢棫怳巕曕峴偺曕梕傪惗惉偱偒傞傛偆偵丄偲偄偆偙偲傪婰弎偟偰偄偨偺偩偗偳丄庴摦娭愡傪峫偊偰偄傞崱丄偦偺曽朄偼揔惓偱偼側偄偲偐丄偐偐偲傪僗儕僢僾偵偟偨応崌偺塭嬁偲偐丄怓乆偁傝傑偟偰丄偦偺曈傝偺僐乕僪傪偡偭傁傝嶍彍偟偰偟傑偄傑偟偨丅
偱丄偮傑愭偺僌儕僢僾柺偑偮傫偺傔傜側偄傛偆偵梀媟傪慜偵弌偡帪偼偐偐偲傪忋偘婥枴偱傕偭偰偔傞偲偄偆梀媟偺摦嶌傪愜傝崬傫偱傒傑偟偨丅
寢壥偼丄丄偆乣乣乣傫丅丅丅丂偁傫傑傝岠壥側偄偐側乕丠丠
偐偐偲僗儕僢僾偵偟偨傑傑偩偲曕偗側偄偲彂偄偰偄偨傫偩偗偳丄慗堏帪娫0.3昩偩偲偩傔偩偗偳丄0.4昩偩偲曕偗傑偡丅0.3昩偱傕曕偗傞曽朄偑偁傞偲巚偆偺偱偐偐偲僗儕僢僾偱傕偆彮偟岺晇偟偰傒傑偟傚偆丅
丂
偦偟偰丄偙偺媥傒偺杮曇偼愭擔姰惉偟偨SEMB偺儁儕僼僃儔儖儃乕僪傪巊偭偰僔僌儅傪摦偐偡偙偲丅丂RS485偼摦偒偩偟偨偺偩偑丄憲庴怣愗傝懼偊傪僂僃僀僩偱懸偭偰偄偰偼偣偭偐偔偺僴僀僷儚乕CPU偑傕偭偨偄側偄丅丂偦偙偱丄憲怣僨乕僞挿偐傜僨乕僞憲怣帪娫傪嶼弌偟偰丄僞僀儅乕妱傝崬傒偱憲庴怣愗傝懼偊僞僀儈儞僌偵妱傝崬傒傪偐偗傞偲偄偆偙偲偱僂僃僀僩偟側偄偱嵪傓傛偆偵偟傛偆偲巚偄傑偡丅
偦偺僞僀儅乕側偺偩偑丄SEMB偺妱傝崬傒偼妱傝崬傒僐儞僩儘乕儔偑偁偭偰丄偦傟偑娗棟偟偰偄傞傫偩偗偳丄僀儅僀僠巊偄曽偑傢偐傜側偄丅
儅僯儏傾儖椶偲丄偖乣偨傜僷僷壀揷偝傫偺HP傗HOS偺僜乕僗偐傜怓乆椶悇偟偰傒傞偑傢偐傜側偄偙偲枮嵹偱偡丅悢帪娫挷傋偰峴偒媗偭偨偲偙傠偱壀揷偝傫偵嫵偊偰儊乕儖偡傞偙偲偵偟傑偟偨丅(^^乁
偦偟偰丄偦偺傑傑嶐擔晻愗偺乽傾僀傾儞儅儞乿傪儗僀僩僔儑乕偱娤偵峴偭偰偒傑偟偨丅丂彆庤偺僴儞僪儘儃僢僩偑僀僇偡偲偄偆塡偩偭偨偺偩偗偳丄丄丄壗偺曄揘傕柍偄嶻嬈梡儘儃僢僩揑側晽杄偼僫僀僗偩偭偨偺偩偗偳丄僾儕僥傿乕偝偱偼婜懸傛傝偼壓夞傞偐側丅丂偱傕乽晄婍梡乿偭偰屇偽傟偰傞偺偑側傫偐偄偄偱偡丅塸岅偩偲側傫偰尵偭偰傞傫偩傠丠
丂
偦偟偰傾僀傾儞儅儞偐傜婣偭偰偐傜丄俁帪夁偓傑偱儅僯儏傾儖傗傜僒儞僾儖僜乕僗傗傜傪挱傔偰偼偆側傝丄偆側偭偰偼挱傔丅丂抜乆偲敾偭偰偒傑偟偨丅
偱傕偝偡偑偵僩儔僀偡傞偵偼帪娫偑抶偡偓傞丅僐乕僨傿儞僌傗僥僗僩偼擔梛偵帩偪墇偟偱偡丅
丂
挬偵側偭偨傜壀揷偝傫偐傜儊乕儖偑撏偄偰傑偟偨丅丂儊乕儖偵傛傞偲嶐擔偺曌嫮偺寢壥偼側偐側偐惓夝偩偭偨傛偆偱堦埨怱丅丂憗懍僞僀儅乕妱傝崬傒傪巊偭偨僒儞僾儖僾儘僌儔儉傪嶌偭偰傒傞偙偲偵偟傑偟偨丅
僞僀儅乕偺憖嶌傗妱傝崬傒偼憗乆偵弌棃偨偺偱丄栚揑偺RS485庴怣愗傝懼偊偵庢傝妡偐傝傑偡丅丂偙傟偑傕偺偡偛偔擄峲丅丂偳偆峫偊偰傕偍偐偟側嬶崌偵娮偭偰偟傑偄丄傕傫傕傫偲偟傑偟偨偑丄妱傝崬傒傪峫椂偟偨僐乕僨傿儞僌偵側偭偰偄側偐偭偨偺偑尨場丅丂僾儘僌儔儉偺婰弎庤弴傪曄偊偰偆傑偔峴偒傑偟偨丅
 丂6僠儍儞僱儖偺RS485偵僔僌儅偺6杮偺懌偑偮側偑偭偰傑偡丅
丂6僠儍儞僱儖偺RS485偵僔僌儅偺6杮偺懌偑偮側偑偭偰傑偡丅
6僠儍儞僱儖傪暲楍偵憖嶌偡傞偭偰偙偲偱寢峔惂尷偑懡偄偺偩偗偳丄僒乕儃偵僐儅儞僪傪憲偭偰僒乕儃偐傜忣曬傪媧偄忋偘傞偲偙傠傑偱偒傑偟偨丅丂偙偙傑偱棃偨傜傕偆戝忎晇偱偟傚偆丅丂僐儅儞僪傪憲偭偰僒乕儃傪摦偐偡偺偼偦傟傎偳嬯楯偟側偄偼偢丅丂傕偆偡偖僔僌儅偑媡僉僱偱摦偒傑偡丅丂峏偵偼1儔僀儞偵僒乕儃偑3屄偟偐偮偄偰偄側偄嬉戲側峔惉側偺偱丄奺娭愡偺妏搙庢摼傕傎傏摨帪偵丄偆傑偔偄偗偽3ms廃婜偔傜偄偱庢摼偱偒傞偼偢丅丂抧柺傪扵傝側偑傜曕偔偲偄偆惂屼傪偝偣偨偄偲巚偄傑偡丅
偦傠偦傠SEMB傪僔僌儅偵庢傝晅偗傜傟傞傛偆偵偟側偒傖側丅
偱偼偱偼丄偦傠偦傠僔僌儅偺僒乕儃偵摦嶌僐儅儞僪傪憲傝崬傫偱傒傑偟傚偆丅丂偲巚偭偨偺偱偡偑丄嶐擔傑偱偺忬懺偱僔僌儅偑僈僔儏乕儞偲摦偒弌偟偨傜働乕僽儖偱傇傜壓偑偭偰偄傞SEMB偑偳傫側恏偄栚偵夛偆偐傢偐傝傑偣傫丅丂偳偭偐偲僔儑乕僩偟偰偦偺傑傑偍朣偔側傝偵側傞壜擻惈傕偁傞丅
側偺偱丄崱擔偼僔僌儅傊偺SEMB偺庢傝晅偗傪偟傑偟偨丅丂傾儖儈晹昳傪嶌傞偺偼戝曄側偺偱丄僾儔斅偱壖屌掕丅丂偦偟偰丄挿偝偺懌傝側偄働乕僽儖傪偄偄姶偠偵墑挿偟傑偡丅
 丂偙傫側姶偠
丂偙傫側姶偠
巄掕揑偵僼傽儞傕庢傝晅偗偰偄傑偡丅丂僼傽儞晅偒偺僸乕僩僔儞僋傪拲暥偟偰偄傞傫偩偗偳丄擖壸偡傞婥攝偑側偄丅丅丂12V偺僼傽儞傪庢傝晅偗偰偄傞偗偳寢峔偆傞偝偄偺偱掞峈擖傟偰夞揮懍搙傪棊偲偟偰傑偡丅CPU偑夡傟傞偙偲偼側偄偱偟傚偆丅丂偁偲丄儗僊儏儗乕僞傪曄峏偟偨曽偑傛偝偦偆丅儕億偩偲偆傑偔摦偒傑偣傫丅俋V偵曄姺偟偰偄傞偺偩偗偳丄掅僪儘僢僾宆偩偐傜栤戣側偄偼偢側傫偩偗偳側丅丂側乕傫偐偍偐偟偄側乕丅
掕揹埑揹尮偩偲偪傖傫偲摦偔偺偱丄憗懍摦偐偟偰傒傛偆偐偲巚偭偨傫偩偗偳丄傕偆偙傫側帪娫両乮屵慜1帪乯丂嶐擔傑偱偺SEMB偲偺愴偄偲丄崱擔偺巇帠偱偺摢擼楯摥偱側傫偐偲偰偮傕側偔柊偄丅丂柧擔偼堸傒夛偱婣傞偺偼抶偔側傝偦偆偩偟丄僔僌儅偑摦偔偺偼傕偆偪傚偭偲偐偐傞偙偲偵側傝偦偆丅(>_<)