■11月16日■
無事、部下の結婚式披露宴も終了し、今日からロボット開発再開。
昨日の飲みの後遺症とスピーチの重責から開放されてか、午前中から午後にかけてぐったりしてました。 このまま1日が終わるのはどうしてもいやだったので、なんとか14時半くらいに復活。 路面の傾斜取り組みの実験を再開しました。
今日はいよいよ斜面の取り込みです。
1歩の開始フレームでの取り込みを行ってみたのだが、フラットな路面なのに10度くらいの傾斜を取り込んでしまう。 それも歩幅が30㎜だと傾斜が5度くらい、歩幅50㎜になると傾斜は10度になる。 取り込みを、あと1フレームずらすと、傾斜は-2~-3度に反転します。歩幅での差はほとんどなし。 ここかな。
次に、実際に段差を与えてみて取り込む傾斜角度を確認。 あまり安定しているとは言えないが、4㎜くらいの段差を与えると+2.5~+3.5度くらいになります。フラット時の取り込み傾斜との差で考えると5度くらいの値が見えてくる。 なかなかいい感じ。
実際に取り込んで歩かせてみた。
結果は×。
歩行での前傾とか、ゆり戻しで姿勢を崩した状態がそのままキャプチャーされてしまいます。 歩いていくと、急にバターンと倒れる。 今はリードつけて歩かせてるけど、リード外せないです。(^_^;)
関節角度を監視することである程度は情報を取得できるのだけど、合わせて胴体姿勢(ロボット全体の姿勢)を取得できなければ路面が傾いたのか、ロボットが傾いたのかがわからないですね。 結局、転倒回避歩行と同じ、動作中のロボット姿勢が取得できない問題に突き当たります。
ただ、遊脚の着地時の足首関節の取得は、路面が平坦だという前提ならば歩行中のロボットの挙動をある程度読み取ることができるともいえます。そっちの路線で進めた方がよさそうです。
わんだほーまでそんなに時間が無いので、そろそろ平坦路でいいから安定して歩行できるようにしなくちゃいかんですね。 路面の傾斜取り込みの試みは一旦クローズです。
■11月17日■
斜面取り込みをやめて、まずは左右動作の安定化に取り組みます。
まずは、カーペットでは引っかかってフラット床では滑ってしまうダメダメな足裏を変更。 ラムダの足首左右関節はコンプライアンスが入っているので、グリップすべきなのはもしかして中央部なのかもしれないと思っていたのでそれをやってみる。 左右にオーバーシュート気味の時は足の側面で立つので、その場合はスリップしてくれればちょっと助かるかもしれないという希望を込めてこんな足裏に、、
サーボの軸があるラインに滑り止めのゴムシートを貼ってみました。 エラストマにしたかったのだが、エラストマだと細工が面倒なので、とりあえずゴムで。。
つま先とかかとはつまずき防止用にテフロンテープを貼ってます。
これがなかなか良好で、今日やろうと思っていた左右動作のオーバーシュートを抑制する制御のための予備測定をしようとしたのだが、こけてしまうほどのオーバーシュートがなかなか発生しない。
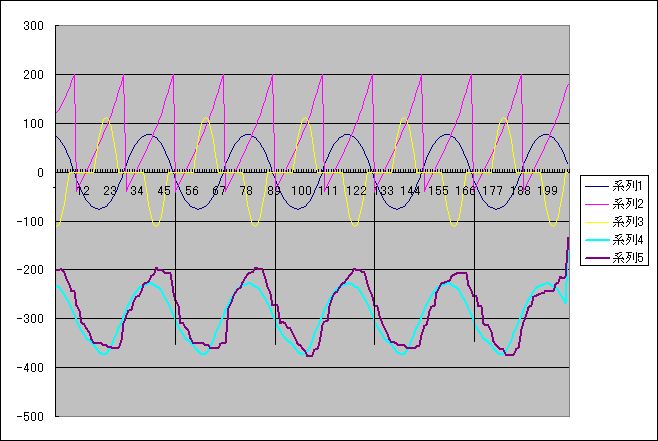
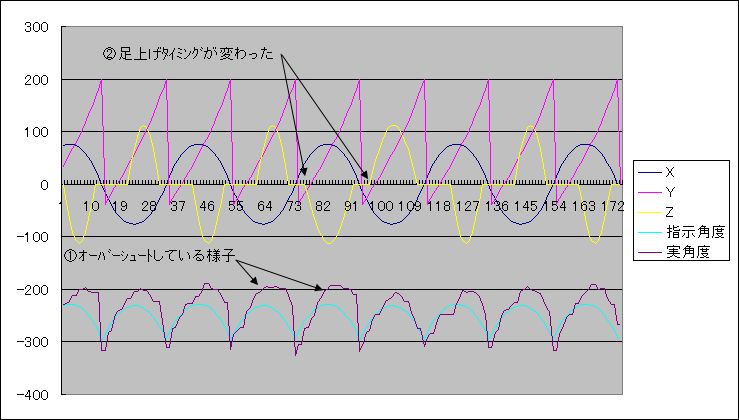
青いラインが足首左右関節の指示角度で、紫が実角度。 指示角度から大きく外れているのが、支持脚の時に上体が傾きすぎている様子。 これが過ぎると横に転ぶ。
縦ラインを描いているタイミングで指示角度と実角度の差を取って、 差が大き過ぎたらフィードバックをかけるという案で実験してみたが、あんまりきれいなデータが取れない。 差分の積分でも取った方がいいのかなー。
ちなみに今日の足裏は直進はなかなかいいが、カーブ歩行(と旋回)が不得意。 深いな、 足裏。
#うじさん、ラムダじゃなくてシグマです。(^_^;)
■11月19日■
昨日はプロジェクトの打ち上げで、今日はばっちり二日酔い。 昨日、帰って風呂に入ったのはいいけど、湯船で寝てしまって1時間半も風呂に入っていたのは秘密です。 目が覚めたら3時でした。
明日は秋葉原でボジョレーの会なのだけど、参加するのはちょっと無理かなぁ~、、、今はアルコール欲しくないし(^_^;)
今日は二日酔い・睡眠不足のなか、残業。 ロボット開発は手付かず。 次は何をしなきゃならないんだっけ? あ~、そうだそうだ、 足首左右関節の指示角度と実角度の差分からフィードバックをかけられるようにしたいんだった。
でも、今夜はもう元気がないし眠いのでもう寝ます。<(_ _)>
■11月22日■

代理エキストラだったのに番組冒頭に登場(^_^;) 撮影現場にいたロボットの中では異形だからね。 シグマは使われるかもしれないなとは思っていたが、「しまけんさん」が紹介されるとは思わなかった。
年末のスケジュールを考えるに、1月11日のわんだほーまでほとんど時間が無いことに愕然とする。 「自律でダッシュ2000」達成まで詳細スケジュールを組まなきゃやばい。 とりあえず今日はオレンジ色のパイロンを探しに行こうかな(^_^;) 100円ショップにあるでしょうか。
オレンジ色のパイロン目掛けて進んで、近づくとパイロンを右か左に見ながら旋回、 その後は元に戻っていくのだが、元に戻るのが難しい。
空間認識はまだできないから、ゴール用のランドマークが必要だろうな。 違う色のパイロンか、熱中夜話Tシャツか。 わんだほースタッフTシャツとの見分けがつかないからもっと違う何かじゃないとまずい。オーナーの顔を捜してこっちの戻ってくるとかできたらいいのにねぇ。CPUパワー足りませんね。
数年前にOPEN-Rカンファレンスで、アイボに往復徒競走をさせたことがあるのだけど、他の出場者がカラープレートを目掛けて進ませて、ターンのタイミングで違う色を見せるっていう「リモコン」で走らせていたのに対して、うちのアイボは視線から見えるコースの形状(台形に見えるんですね。)を簡易認識させて、自律で往復させたのだけど、あれから何年も経っているのに進歩どころか退化しちゃってるのだからどうしようもないなぁ~。
■11月23日■
普段ならこの時間に書く日誌はその日の日誌なのだが、どうせ明日(23日)は書かないだろうということで23日の日誌ってことにする。
歩行フィードバックのテストをしていたところ、ジャイロのデータがおかしいことに気付く。 左右(Y軸周り)はそれらしい値が出ているが、前後(X軸周り)はどうも無反応。 分解して調べたら、ちゃんとした値が出だした。 接触不良かなー、、 と思って実験を続けていると、今度はXもYもおかしくなった。ベース値も狂ってきてしまった。 あれれ~、ジャイロセンサー壊れちゃったか? 本格的に調査に乗り出して、センサー出力とADCの間に入れているローパスフィルターを外してみたり、配線チェックをしてみたり。
ふと、配線していないグランド端子があることに気付く。。 「これなんだっけ???」 ADC用電源端子の隣にあるグランド端子が配線されていない。 ノイズが多いのはグランドが弱いのだろうと思っていたが、配線していなかったとは(^_^;) 一応はATMEGAとしては電源用グランドは配線されていたからそれなりに動いていたのだろうが、ちょっと弱かったわけだ。 グランドの配線を追加したら、動作不安定は解消しました。
まだ他にも不審な動作をする部分がある。 RS485が不調だなーと思ったら右足の配線を外すと正常に戻る。 つけ外しを繰り返していると、正常に戻ってしまったり。 きっとどこか断線しかかっているんだろうな。(>_<)
こないだ早稲田に練習会に行った時のことだが、ラムダのプログラムを動かしだしてもサーボが言うことを聞かない。 結局は輸送中にサーボケーブルが切れていたのだが、発見に随分手間取った。 プログラム開始時の初期設定とサーボチェック部分を強化して、サーボがつながっていないことをちゃんと通知するようにしなきゃならんと思っていたのだった。
ということで、歩行フィードバックのテストは後回しで、サーボチェックプログラムの改良をしていました。 ついでに初期設定方法も変えて、時間がかかるけど確実に初期設定するようにしました。 急がば回れ。。 回ってばっかりですが。(^_^;)
さて、次は。 自律で歩かせるとなると、こけて首がくったりしてしまってはパイロンを見ながら歩けない。 今はネジヒューズにしてサーボを守っているが、イベントに出るとなると、これでは不都合が多い。 なんとか過負荷にはサーボから逃げて、過負荷が解消したら復帰するようにしたい。
第一チルト(胴体側)は前にこけた時に手前に、第二チルトは後ろ側にこけた時に後に過負荷がかかってヒューズが飛ぶ。 双方向にリミッターをつけるのは難しいが片側ならなんとかなるんじゃなかろうか。 構想を絵にして見たが、どうも絵に描いた餅。。 バネの荷重って低荷重側がリニアだからこういう用途には不向き。 パンチがあるバネってないかなー。 月曜日の課題にしよう。
 パイロン、 本物しか売ってなかった。
パイロン、 本物しか売ってなかった。
明日は高専ロボコンの観戦ツアー。 ロボット持って行かないから代わりにデジイチ持って行こう、望遠つけて。
■11月24日■
高専ロボコン観に行ってきました。
気になるロボットをチョイス。 意外といっぱいあるなぁ。
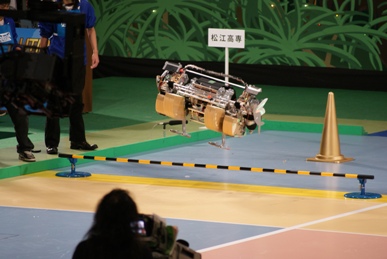
↓まずは、松江高専のエアフィート。 バイーンッと跳びます。ダイナミックでシンプルで、相当気に入りました。
↓津山高専のキカイタイソウ。 なんと大車輪のパフォーマンス中。 歩行も面白い。

↓岐阜高専のZiN。 この2足もなかなかの大作なのだけど、前半の多足部分も気になりました。

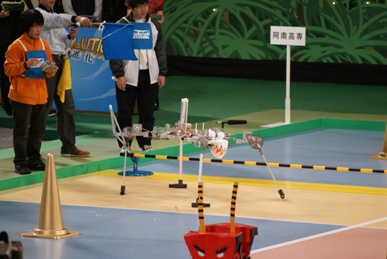
↓阿南高専のACE。 こいつはなかなかなか素晴らしい。操作が難しそうです。
↓沖縄高専のMovement。 ティラノザウルスタイプでガスガス歩きます。

結果と動きとメカニズムは放送で観てください。 12月30日放送らしいです。
しかし、、、動きのあるシーンでは一眼レフがいいですねー。 シャッターを切ったシーンが残るのきもちいー。 ま、それだけなんですがぁ~(^_^;)
それにしてもそろそろ「自律でダッシュ2000」まじめに取り組まねば。 こないだから同じことを言ってるか(^^ゞ
オーバーシュートフィードバックを一気に組み込んでみた。 指示値を超えるエリアの越えた分を積分して、閾値以上超えたらリニアに足上げタイミングを変化させる。
普通に歩いていても閾値を超えないので、タイミングを合わせて肩を突いてやりました。
押されてバランスを崩したのに応じたようで、いい感じです。 転倒回避にプラスの効果があるかはまだ不明(^_^;) パラメータ調整できるように作ったのでしばらくこれで動かしてみます。
次に、ロボットの不安定具合を数値化します。
リモコンだと操作者が見て、フラフラしてこけそうだったら歩き出さないということができるのだけど、自律の場合はその判断もロボット自身がしなければなりません。
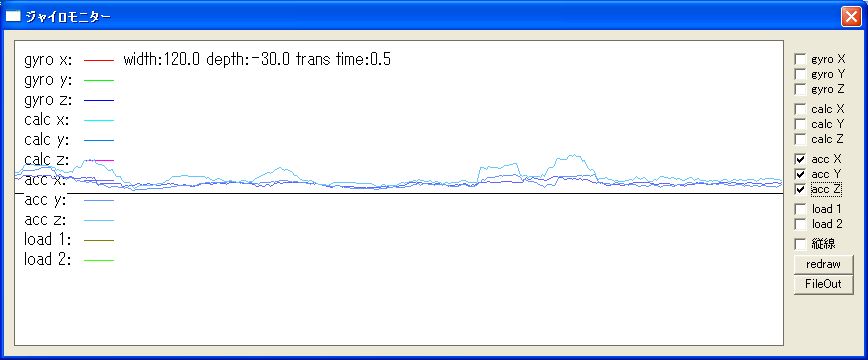
ジャイロデータを使うべきなのかもしれないけど、今使っているジャイロは感度がイマイチ。 データがノイズに埋もれてるっぽいので、加速度センサーデータを使います。
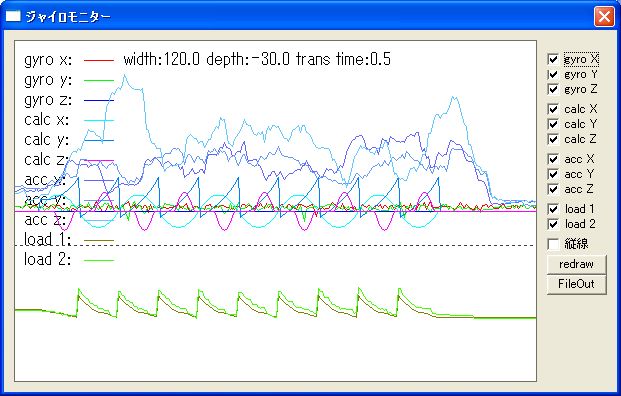
直近0.5秒の加速度センサー値の微分値の絶対値の積分、つまり振動の大きさ成分だけを取り出したものです。3本のラインはそれぞれXYZ軸です。3本とも低い値をとっている場合は安定しているってことですね。 この値を見て歩き出せばよいわけです。
ちなみに↓これが歩いている時のデータ
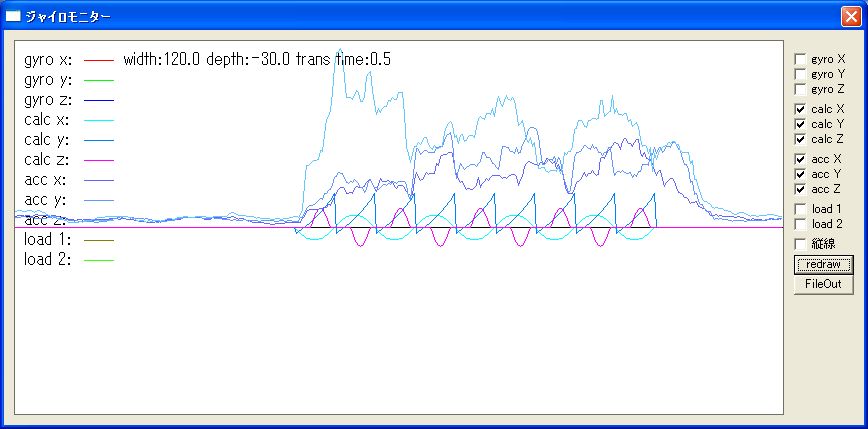
歩き出しは急激な振動の立ち上がりを見せているけど、止まった時は振動が減衰して安定に到っていることがわかります。
■11月24日-2■
ラムダはこのところ外装を取ってしまっている。顔と胸部分だけつけてればなんとなく形としては整っている感じ。 手足の外装をつけていると、外装がどんどん壊れていくってこともあるのですが、フレームのネジが緩んでいるのに気付かないってのが問題です。 それで一度腕のフレームが千切れているのに気付かずにいたし。
でも、年明けのわんだほーに出ることができたら、このままじゃみっともないので外装をつけようかと思ってます。 今度は簡易的にプラ板で作って急場しのぎの感じで。
ちょっと気が向いた(というかプログラムに飽きた)ので、簡易外装を工作用厚紙で試作してみました、 左半身だけですが。


色つけたらそれらしくなるかなー。 手足が黒いツートーンの方がいい感じかな?手足の色を胴体と変えてみるか。
更には胴体のカバーもさっき壊してしまった。(>_<) これも直すかなぁ~。
少なくともダッシュ2000は自律で出るつもりなのだが、コントローラを介して会話(?)出来るようにしたい。音声認識は無理だからねー。
「どうした?」 とか、 「そっちじゃない」 とか、 「がんばれ!」 というボタンを割り付けて指示を出す。 「どうした?」の返事は音声合成で出したいね。
「どうした?」 (どうしたボタンを押した)
「パイロンを見失いました。」(音声合成で返事する)
とかね。 RS601CRは温度警告を出すので、「右ひざがやばいです!」とか言わせたりしてね (^_^;)
オーバーシュートフィードバック、なかなかいい感じなので前後でも同じフィードバックを入れてみようかと思う。 前後はパラメータが多いのでどうフィードバックすべきか。 前につんのめったら遷移時間を縮めて、歩幅を大きくしたいところだがサーボが間に合わなさそうなので、歩幅を縮めて足上げ高さを大きくする。 後に反り返ったら、、、 一旦停止するかな。
ううむ。。 やること多過ぎ。
結局、今日は首のリミッターには手を出せず。 結構大掛かりな工作になりそう。 ちょうどいいバネあったかなー。
■11月25日■
残り少ない貴重な日数かつ、やること多過ぎ状態なのだけど、今日は残業。 明日は出張。 (ーー;) 来週には大阪出張がありそうだし。。
ずっとやらなきゃやらなきゃと思っていたアイボのバッテリー一斉充電をとうとうやりました。 今はまったく電源を入れなくなったアイボなのだけど、システムとしてとても気に入ってるのでちゃんとメンテしようと思っていた、 思っていたのだけど、 調べたら前回充電したのは1年と3ヶ月前。 半年に一度はやりなさいと言われていたのに。。。 ソニーに。

次回の充電予定日は5月25日です。
ファイルを整理していて見つけた、多分ソニーの企業CMの一コマ。

QRIO、いいなー。 こんなすごいもの作っといてあっさり捨てちまうなんて、、わっからんなー。
なんか知らないけど今は無きソニーロボットデーでした。<(_ _)>
■11月29日■
このウィークデーは残業と出張+飲みばっかりでロボット開発は一切できなかった。 練習会前にやっておきたかった諸々が一切できなかったのはイタイ。(>_<)
ウダウダ言ってる暇はないので歩行時の前後方向のフィードバックをやってみる。 足首前後はコンプライアンススロープも硬い設定なので実角度と指示角度の差が小さい。 その上オーバーシュートのように片側だけを監視するわけじゃなく、前後どちらも監視しなければならないのでちょっと厳しい。
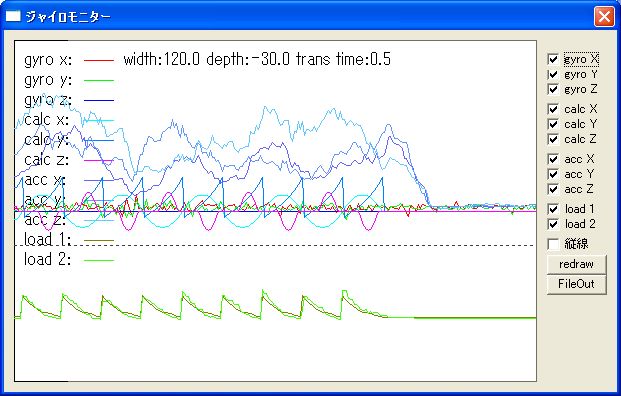
 普通の歩行
普通の歩行
一番下の2本の線が支持脚の実角度と指示角度。 ちょっとだけ実角度が小さい(ゼロに近い)。
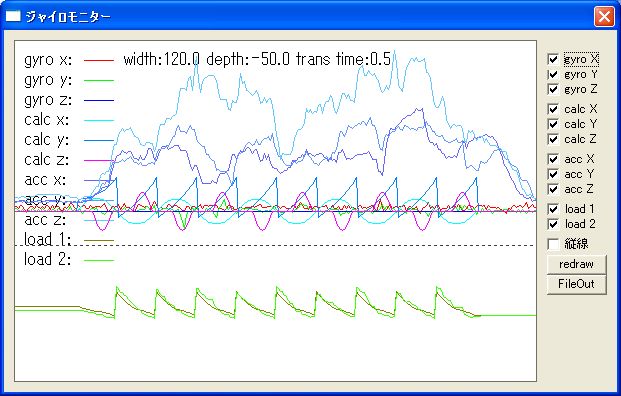
 後に倒れそうな場合
後に倒れそうな場合
後に倒れそうな場合を連続採取するために手を添えて、後に荷重をかけながらのデータ採取。 後よりなので実角度は全体的にゼロに近づいている。
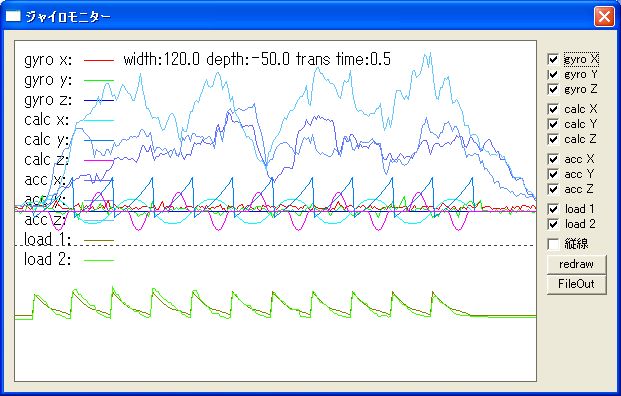
 前に倒れそうな場合
前に倒れそうな場合
同じく前に荷重をかけるように手を添えながらのデータ採取。 これは普通の場合とほとんど変わらない。基本、前に荷重がかかっているので倒れそうな場合と正常な場合での差が見られない。
そこで、前側のコンプライアンスだけ少し緩めてみた。
 緩めて通常歩行
緩めて通常歩行
 緩めて前のめり歩行
緩めて前のめり歩行
うむむむ。。。 差があるか? 下側にずれている部分が大きくなって欲しいのだが、上側にずれている部分が小さくなってるか? そちらで判断した方がいいか?
積分値を出してみると、左右で値が違う。 ん~、つまり、閾値を前後左右の4種類管理しなければならないってことか。 めんどくさー。 旋回歩行の場合も、カーブ歩行の場合も値の傾向が変わりそう。これは一筋縄ではいかない感じだ。
実は、前後のフィードバックはコーディングだけして、調整やらなんやらは後回しして、今日は量をこなそうと思っていたのだが、やりだすとうまく行かないとやっぱり「うぅ~ん」と考え込んでしまう。作業のテンションも下がるし。。 今日は効率悪かったなー。
■11月30日■
今日は練習会。 昨日思い通りに作業ができなかったラムダを持ってRTへ。 ついでに部品を買いに店を回ったのだが、欲しかったコネクタが買えなかった(>_<) 日曜日に休まないで欲しい。。
今日はROBOSPOTとRTでの二元練習会。 ラムダはKONDO部品を一切使っていないので、もちろんRTへ。 RTも盛況で1時前に行ったら既に空いている場所がほとんどないくらい。
早速ラムダの開発作業、昨日やりたかったことをやろうとしたら、右足ロール軸の配線が切れている。 これかぁ~、こないだから不整脈を出していた部分は。。 こないだから練習会のたびにサーボケーブルが切れている。 全体のオーバーホールが必要な時期なのだろう。 お店にはんだコテを借りて修理。
今日は大学生のグループがたくさん来ていたのだが、千葉工業大学のグループが練習会初参加。 動かしているロボットの説明をしているのを聞くと、倒立振子で計算歩行していると、、 おおぉ~すばらしい\(◎o◎)/!
聞くと、ロボットは草加のロボフェスにも参加していたゴマシオじゃなくてノリタマじゃなくてアオノリ! (^_^;) 草加での打ち上げで自己紹介してたけど、ノーマークだったなー。
そして、H8で計算歩行している上にすばらしい安定度でがつがつ歩いている。
そこからは計算歩行の取り組み方やら問題点やら未来展望やらで二人で話し込んでました。 とっても刺激になりました。ありがとうございます。 お名前失念してしまったのでWebページ見に行ったら既に今日のことが。。木村さん、お互いがんばりましょー。
最近思っていたのだけど、やはりラムダの足は重すぎるようです。アオノリは線形倒立振子軌道で(幾分補正を入れているらしいですが)しっかり歩いていました。 ラムダはそれじゃ歩けなかったんです。線形二重倒立振子にしなければならないってことは足が重いってことですから。 ラムダマークⅡはできるだけ足が軽くなるように設計しようと改めて誓ったのでした。
ラムダの歩行、家のカーペットだとそこそこ歩いて、オーバーシュートのフィードバックもうまくいってたのにRTのカーペットだとイマイチな感じ。 難しいなぁ~。 リングで歩かせようと思っていたのだけど、コントローラをつなげるプログラム記述が現場でできなかったので、あきらめ。 今度RTかロボトマに持って行って調整しようかな。
わんだほーのダッシュ2000用パイロンの件だが、RT常備のわんだほーセットなのかな? RTにおいてました。
 これ。 あ、2つ重なってますが。
これ。 あ、2つ重なってますが。
ダイソーに売ってるとか。 実は近くのダイソーはチェック済みだったのだけど、↓これしかありませんでした。でかい。
 でかっ!
でかっ!
ダイソーなんだから、どっちも100円なんだろうなー。 不思議な世界だ、、100円ショップ。。 しかし、赤羽のダイソーまで行くのはつらい(>_<)
このショッキングオレンジはラムダには親和性が高い色で、無調整で色認識できてました。 会場で急いでカラー調整しなくて済みそうで一安心。
■12月1日■
気持ちを新たにわんだほー向け開発に取り組む。
昨日の練習会ではリモコンを組み込めなかったので、まずはコントローラの組み込みから。
トラッキングやらアプローチやらの仕組みとコマンド用アプリからのコマンドを受ける仕組みと、色々ごちゃごちゃになっているのでなかなか大変。 なんとか、前後に歩行するためのコーディングは完成した。

受信機は輪ゴムで仮止め (^_^;)
配線はぐちゃぐちゃだし、外装もバキバキだし、ケーブルは切れかけだし、もうボロボロです。
仮想リングとして、MDFボードの上を歩かせてみる。 ズルズルに滑るなー。 もうちょっとグリップさせてみようと思う。
■12月2日■
今日もがんばって早く帰ってきました。
今日のお題は音声合成の組み込み。 音声合成プログラムはGalatea Talkを改造してライトにしたもの。 STDINからテキストを流し込むと発声するようにしています。 さらに、テキストの変換時間が結構長いので、オーディオバッファ分だけ変換が終わったらデバイスに随時流し込むように作りました。 数年前のことですが。
ただ、音声発生は途切れると話にならないので、ラムダを動かしながらちゃんとしゃべられるかどうかが心配。
ラムダのメインプログラムからGtalkを呼び出して、パイプでつなぎます。 パイプというのはプロセス間通信の仕組みの一つで、ラムダの場合、画像処理の処理結果は共有メモリー、音声データの出力はパイプを使っています。
日本語コードが間違えていて、しばらく悩んだけど、程なくしゃべりました、、、ノイズばりばり混じりで。。 (ーー;)
やはりラムダの制御プログラムを動かしながらの音声発声は無理があるらしい。ちゃんとスケジュール管理しなきゃ無理なんだろうなぁ。
とりあえずはGtalkの優先順位を最大に上げてしゃべらせれば、ノイズはなくなることがわかりました。 その代わり、発声中は動作プログラムは完全に止まります。 歩行中にしゃべらせたら、すっ転びます。
Gtalkの方のプログラムを修正して、ある程度プロセスを明け渡すようにすればちょっとはマシになると思いますが。。
ラムダにしゃべらせているところ(といっても口があるわけじゃないのでなんてことはないのですが、、)をビデオに撮ったのだけど、WMV形式へのコンバートに失敗してしまい、アップできなかった。 ま、動画で出すものじゃないからいっかー。
音声と動作の共存については時間があれば手をつけるということで、とりあえずは排他的動作をさせることにします。 時間ないので。。(^_^;)
■12月3日■
わんだほーに出場した時のハンドリングを考えて、ラムダの制御プログラムをOS起動時に自動実行するように設定してみた。 コンソールなしでサーボ初期化の結果(サーボの初期化に失敗したとか成功したとか)を音声で通知しようと考えているのだが、現在はGtalkの発声終了通知が無いので、連続してしゃべると後からしゃべった台詞がキャンセルされてしまう。 Gtalkに大きな改造を加えないで解決する手段はないかなー。台詞が決まっていればウェイトさせればいいんだけどねー。ちょっと趣味じゃない。
それは課題としておいといて、後の時間は歩行の調整をやってました。 いままでよりスタンスを狭くしてみました。 今まで、スタンスを狭くすると横にすっとんでしまってうまくなかったのだが、膝関節のトルクを最大にしたら(いままでちょっと弱めにしていた) スタンスを狭くしても歩けることが判った。 逆に膝トルクが最大のままでスタンスを大きくするとちょっと跳ねるんですね。それでトルクを弱めにしていたんだけど。。
スタンスを狭くして、ちょっと膝を伸ばし気味にしてやると歩行が少しだけ軽快になった。 膝の持ちもよくなったのだが、オーバーシュートのフィードバックが失敗しやすくなった。フィードバックしない方がいいくらい。 ということで、フィードバック方法を違う方法にしてみました。 加速時間を短くするのではなく、次の1歩の開始を少しだけ待つようにしてみました。 あと、次の1歩のスタンスをちょっとだけ広めにしてみる。
試してみると、さっきよりはちょっとましかなーってところ。 前後のフィードバックを組み込んだらまた状況は変わってくるような気もしないではない。
■12月7日■
木曜、金曜と深酒をしてしまい、土曜日はほとんど死んでました。(ーー;) 残り少ない土日なのになぁ~。
それでも土曜日の深夜からラムダをいじり出して、歩行の調整なぞしておりました。 フィードバックをかけても、というよりかけると、突然不意にどしゃーっとこけることが多い。フィードバックの掛け損ないって感じ。 これをちょっとでもなくすために色々変更していまして、結局はオーバーシュートのフィードバックはウェイトだけにしました。 そして足首の左右関節のコンプライアンススロープはほぼゆるゆる状態が一番こけにくそう。 というところで落ち着きました。
今日もそれほど元気じゃぁないんだけど、ちょっとでもこなさないとどうにもならん。
今日は、ラジコン周りの整備。 コントローラでトルクを入れたり落としたり、コントローラだけで操作の開始が出来るようにしてました。 しばらくデバッグしていると、急に無線LANがつながらなくなり、そしてコントローラもつながらなくなりました。 うちは電子レンジ使ってないし、、もしかして隣の家かな? これが本番に起こったらどうしようもない。なにか考えとかなきゃな。
ヨチヨチ歩きのラムダ。 オーバーシュートのフィードバックが強すぎるのか、すたすたと歩かない。 もうちょっと加減が必要らしい。
あと、歩行用、音声合成、画像用プログラムを同時に動かしてみましたが、なんとか動きそうな気配。 ちょっと、、だいぶ不安ですけど。。 それに音声合成は同時じゃなくて排他だから。
■12月10日■
ここしばらく仕事が忙しく、常に明日のための資料作りに追われる毎日。 ヤマを超えたかと思ったらまた新しいヤマがやってくる。キビシ~(>_<)
仕事の絶え間ない攻撃と、出張帰りの飲み会が相まってウィークデーのロボット開発がまったく出来ない日が続いてます。 つ、つらい。。
そして来週の火曜日から土曜日まで中国~台湾へ出張、、 今日正式に承認されてしまいました。(ーー;) 明日から出張用の資料作りです。。もちろんそれだけじゃーないし。。
わんだほーの申し込みって21日の朝9時だから、寝坊しないようにしなきゃな。 帰国して次の朝だからちょっと心配。
歩行の安定化のためのフィードバック方法を色々と検討中なのだが、ウェイトを入れるのはどうもイマイチ。 もう、ぎりぎりこけちゃいそうってくらいのオーバーシュートならウェイトでもいいのだろうけど、それほどじゃない場合にウェイトを入れてしまうと、周期がずれてしまって逆に安定しない様子。 難しいなー。 フィードバックを加えるパラメータは他にも幾つか考えられるので順番に試していくしかないのだろうか。 うむぅ。。
よちよち歩いている動画を載せておいたので、わんだほーに参加する事になったらいい感じに対戦相手を組んでもらえるだろう。(^_^;) サイコロを持ち上げたりさせたいけど時間的には無理だろうなー。 自律でダッシュ2000にだけ焦点を合わせてがんばろう。
今年の帰省はとうとうラムダ開発セットを一式持って帰ることになりそうだ。 年末年始は酒飲まずにがんばろう。
■12月14日■
なんだか久しぶりの日誌です。
ウィークデーは忙しくて、結局ロボットにはまったく触れなかったのですが、土曜日もぼんやりしていたり、出かける用事があったりでほとんどロボットには触れられませんでした。 わずかに足裏を作るという工作をしました。
中央部にエラストマを貼ってメラミン樹脂板の上でも滑らないようにしてみました。つま先はエラストマがはがれてくるのでジュンフロンテープで保護+つまづき防止。
これでみっともなくスリップするのは防げたと思う。(※スリップで歩くのがみっともないのではありません。ラムダがスリップしちゃってガシャガシャ歩く姿が初心者のアイススケートみたいでかっこ悪いのです。 ) リング素材の床で歩かせていないのでなんともわからない。 本当はこの土日、土曜日に開発作業をして、日曜日はRTとかろぼとまで歩行調整するつもりだったのだが、土曜日に作業ができなかった(やらなかった?)ので日曜日に開発作業をすることになった。 歩行調整する機会ないかなー。
MDF板の上で歩かせてみたところ、まぁいいでしょう、、という感じ。
歩行のフィードバックの方法についていくつか試してみたのだが、いずれもダメ。 ウェイト入れるのが一番安全。 フィードバック量の取り方を変えるべきかもしれないな。
日曜日は主に画像関連の整備。 と言っても、以前に作ったトラッキングとアプローチを修正して「自律でダッシュ2000」用の仕組みを作ろうということ。 今回は客席の何かとパイロンを間違えないようにカラーで分離したピクセルをラベリングしたデータでトラッキングする予定。 一緒に出走するロボットが竜鬼じゃなきゃきっと大丈夫だろう。(竜鬼の色ってオレンジ色で、パイロンの色に近いので。。)
トラッキングのデバッグをするために、歩行調整でバッキバキに壊れている首関節周りをすべて修正。 サーボのギアが一つかけてました。(^_^;) RS302CDなのでプラギアです。 301用のメタルギアを入れようかな。 302を買ったのは失敗でした。 ケチって302にした(トルク的には十分なので)のだが、すぐにギアがかける。 何度も交換して最後にメタルギアを入れて、、、 結局301買うよりお金かかってますから。(>_<)
トラッキングさせながら歩かせてみると、ちょっと処理オチが発生して歩行が不安定になっている。 でも、、MDF板の上であればなんとか歩いている様子。 ちょっと頼りないがこれで行くしかないな。
今日もたいして作業は進まなかったけれど、今週はもう作業できません。 明日は帰って出張の準備。 明後日は始発で成田に向かわねば。 帰ってくるのは土曜日の夕方になるでしょう。 ふぅ~。
■12月21日■
やっと昨日、台湾から戻ってきました。 台湾でのラストナイトはなかなかハードで、昨日は一日中二日酔い&睡眠不足。 飛行機その他の移動中はうつらうつらしたけれど、興奮しているのか良く眠れない。 帰ってもぐったりしていて昨日は早くねました。
今朝は不思議と8時45分に目覚めたので無事わんだほーの申し込みができました。 申し込みは無事終わったんだけど、ラムダの準備の方はさっぱりです。。
朝食って、昼食って、それでもまだ動けなくて3時くらいまでテレビみながらうとうとしてました。 3時くらいからやっと動き出して、画像処理プログラムの修正を開始。
画像処理プログラムはほとんど実験コードのカタマリなので、実用にするためには結構手を入れなければなりません。
だらだらやって、やっと、複数色のラベリングデータで、もっとも近いものにトラッキングすることができるようになりました。 もちろん一度にトラッキングできる色は1色ですが。
これで、パイロンを見ながら、他の色のランドマークの位置を確認できます。
トラッキングのデバッグをやっていたら、なぜか足元にピンクの何かを感知する。 なんだろう?と思って調べると、、
![]() 画面一番下のちっこいのもピンクの何か。
画面一番下のちっこいのもピンクの何か。
![]() 膝にピンクボールが写ってる!
膝にピンクボールが写ってる!
膝のフレームに写ったピンクボールの写像。 写像かぁ~。 立ってる姿勢ならこの問題は起こらないだろうから無視かなぁ。
同じ色で複数のラベリングデータが存在するとき、目的とするものは何かを決める何かが必要なのだけど、今回は距離にしました。 目的のパイロンまでの間にパイロンと同じ色の物体が有ったら誤認識します。 パイロンをターンして、ゴールを意味するランドマークが見える前に観客席にランドマークと同じ色が見えてしまうと誤認識の恐れあり。
距離1メートルってのを前提にして、スクリーニングするくらいのことはしないといけないだろうな。
形状で判断できればいいんだけどねぇ。 ラムダにはまだ無理です。
さて次はパイロンに向かって歩いていき、パイロンの周りを回るってことをやらせるんだけど、そんなに広いラムダが歩けるスペースが無い。 カーペットの上はさすがに不安定過ぎてこけて首サーボを傷めるのがオチだ。 リビングの床を傷つけるのはまずいだろうしなぁ。MDFボードを大量に買ってくるか?
久しぶりの更新です。 そして恐らく今年最後の更新になります。
今日は年末休暇の初日。 やっかいな仕事はなんとか年内に片付けることができました。 さて次はわんだほーに向けての開発です。
ですけど、今日は年賀状書いたり部屋の片付けをしたり、そして今夜から帰省先の神戸に向かって出発するのでその準備もしなくちゃならないのでがっつりとロボット開発をすることができません。 仕事をやりながら考えていたダッシュ2000自律化のプログラムを整理してみたいと思います。
・まずステージ1 パイロンに向かって歩いていきます。 早速ここで問題が。 1メートルも離れるとパイロンが見えないらしい。 少なくともラベリングデータにしてしまうと見失ってしまうかも。 ステージ1はCDTで処理した方がいいかもしれない。
・ステージ2 パイロンの周りを回るステージに切り替わります。 切り替わり条件は首の角度。 トラッキングしているので視線の中心に目標物があるとすれば座標計算までしなくても首の角度で判断してしまえばいいかと思います。
ステージ2の間は首の角度が、画像の角度となるように歩行方向を調整しながら歩くことになります。
・ステージ3 復路になります。 ステージ2でパイロンの周りを歩きながら、視野にゴールを示すランドマークが目に入るのを調べます。
ゴールのランドマークが目に入ったらそちらに向かって歩きます。ここではスポーツタオルの青い色を見せています。

・ゴール ランドマークに十分に近づいたらゴール。 これも首の角度で判断できます。

このストーリー通りに進めばいいのですが、実際には外乱があったりして思い通りに進みません。 例えばステージ1ではどれくらい歩いたらいいか、ステージ2では、、というふうに目安を持っておき、その目安値とかけ離れたタイミングでマークが見えたり近づいたりしてもステージの切り替わりが起こらないようにする必要があります。
また、こけた場合、立ち上がって動作を再開することになるのですが、マークになる物体を間違えて見つけてしまったら大変です。難しいですけど、2条件くらいが成立すればいい、などの対処が必要になるでしょう。
トラッキングをさせながらMDFボード上を歩かせると、トラッキングなしの場合に比べて若干不安定。 こけてしまいます。もう少し調整か工夫が必要なのですが、その時間は、、、ないなぁ。
 動画
動画