
�J������(28)
�g�b�v�֖߂�
�J�������C���f�b�N�X��
�O�̃y�[�W��
���P�O���P�W����
����͂ł���̂��̑ł����킹������͂��������̂ł��̎��Ԃ܂�RT�ŕ��s���������ɂ����܂����B����悭���[�V�����쐬�����悤���ȂƁB
���T��RT�T�b�J�[�̂��߂Ɋ֓����{�b�g���K��Ȃ݂ɂ����̃����o�[�����ĕs�v�c�ȋC���ł����B�@�����O���ł͖��Ȃ�������悤�ł��B�@�O��̗��K��ŏd�S�ʒu�̂��ꂪ�����ĕs���肾�����̂����ǁA�܂��\���Ɉ��肵�ĕ�����݂����B�����O���Ȃ�A�ł����ǁB�@������100�~�����炢�܂ōL���Ă݂��Ƃ���A�����O���Ȃ�܂��܂��������������B����Ȃ�W���J�[�i�łQ�����[�X���炢�͂܂Ƃ��ɂł������Ȋ����ł��B�@�G���g���[���悤���ȁB
���̌ネ�{�X�|�ɍs���āA���炭�͂ł���̂��̎d���ݒ��������X�i����ɂ��낢��Z�p���b���Ă܂����B�@���̌�A�Ђ낵�ŔӔѐH���Ȃ��炠�̘b�₱�̘b�Ő���オ��܂����B
�����̓}�W�X�p�̉�ɎQ�����Ă��܂����B�@��N�J�Âɑ�����2�x�ڂ̎Q���B�@��N�̉�ł́A�������Ⴂ�����̂��g�ˎ��ɍs���Ă��܂��Đΐ삳��ɑ҂��Ă�����č�������Ƃ������Ԃ���炩�����̂ŁA����͒��Ӑ[���s�����̂ł����ǁA�o���ԈႦ�Ă��܂����B�@�W�����Ԃɂ͂��肬��Ԃɍ������̂Ń��V���Ă��ƂŁB
�m���O��͗l�q���ŗ}���C���̒������������ǁA����͂��܂܂���Ɠ����e�[�u�������������ŁA�����Ń`�L���i�Ɋy�j�{�v�`�o�[�O�{���������{�o�i���b�V���@�Ƃ���������Ƃ������탁�j���[�B�@�ŏ��͐h�������̂����ǁA�i�X�h���͖�Ⴢ��Ă��܂݂���������悤�ɂȂ��Ă�����ł��ˁB�s�v�c�ł��B�@���̏�ƂȂ�Ƃ��̃A�j���[�_�[����ɂ̂������܂���āA���ƌ��������炢���ȏ`����яo�����Ƃ����u�V��v�ɂȂ�̂����ǁA����͂������ȁ[�B�@����͟��ςɗ��Ƃ��ċC�y�ɂ������������Ǝv���܂��B
�}�W�X�p���U�̌�͂܂������ƂɋA���ă��{�b�g�J���B�@�̂��肪�A���̂����[�����C�ɏP���ă\�t�@�[�Œ��Q�B���Q������߂ăh���}�i�uJin�v���Ă�����҂��^�C���X���b�v����b�j�̏���X�y�V�����̍ĕ������Ă̂�2���ԊςĂ��܂����B�@�ʔ��������ȁB����ǂ�ł݂悤���ȁB
���{�b�g�̕��́A���̐v���I���āA���̌��ς�����A�~�G����ɂ��肢���܂����B�@���ʂ͐v���I����Ă������Q�����Ă��琻��ɓ���̂����ǁA�܂������ł��傤�B

���������A������ƘN����܂����B�@�����̂Ƃ���d�q��H�̓n�[�t�s�b�`�̃��j�o�[�T����ɑg��ł����̂����ǁA����ɂ����R�l�N�^���Ă̂��Ȃ��č����Ă����B
�d���Ȃ���1.5�o�s�b�`�̃R�l�N�^�����g���Ă����̂����A�Ƃ��Ƃ�1.25�o�s�b�`�̃R�l�N�^�������B�n�[�t�s�b�`���ƁA1.27������0.02�o����Ȃ��킯�����A��ԃs�������������̂�15�s���A����15�s���̃R�l�N�^�ł��n�[�t�s�b�`���j�o�[�T����ɃX�����Ɠ���̂ŃI�b�P�[�ł��B�S������ɐ�ւ������C�������B�@�����b�N�X���炵���ł��B
���P�O���Q�O����
�����_�̌v�Z���s�A�ƌ����Ă��J�[�y�b�g�ł͕����Ȃ��Ƃ����̂��炭�Ȃ킯�����A�@�܂Ă�H����������Ɨ�ÂɂȂ��J�[�y�b�g�ł͂��܂������Ȃ��̂��l���Ă݂悤�ƂӂƎv���܂����B
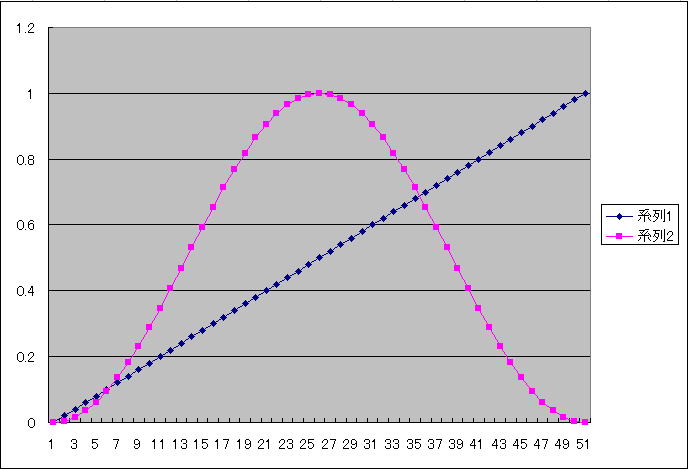
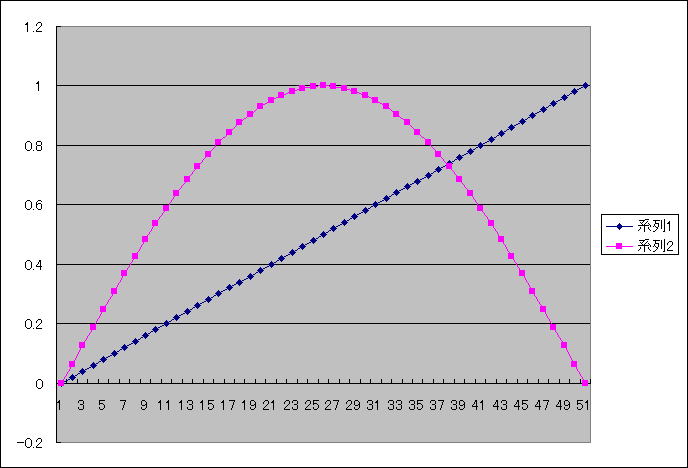
���̐U��グ���ŁA�P�Ȃ�T�C���J�[�u���g���Ă����̂��A�����x��}���邽�߂ɂ��[���Ƒ����グ��悤�ɕύX���ĕ��ׂ̋}�ς�}����Ƃ������Ƃ�����Ă����̂����A����́��̂悤�ȃJ�[�u�ƂȂ�܂��B���̏ꍇ�A�����͎��Ԃł���Ƌ��ɗV�r�̑O������̓����ł��B
�܂�A���グ�̏����Ƒ����낵�̖����ł͎����㏰�Ɛ��肠�����ƂɂȂ��Ă��܂��܂��B�X���b�v���₷�����ł���AZMP�������̋r�Ɉڂ��Ă��邱�Ƃ����A���X�̂��葫�͖��Ȃ��̂ł��傤���A�J�[�y�b�g�̏ꍇ�͂��̂��葫���������ŁA���ɑ������낷�ꍇ�ɂ͂�̂߂��Ă��܂��ĕ����Ȃ��Ƃ����Ȃ̂ł͂Ȃ����낤���Ǝv��������܂����B
�����ŁA�V�r�̖߂��̊������̗l�ɂ��Ă݂܂����B�@�@�����͎��Ԃł����A���ƈ���ėV�r�̑O������̓����͉����Ƀ��j�A�ł͂���܂���B�O������̓O���t�̍��F�̃��C���̂悤�ɍŏ��ɏ������ړ����A�Ō�ɂ܂��������ƈړ����܂��B
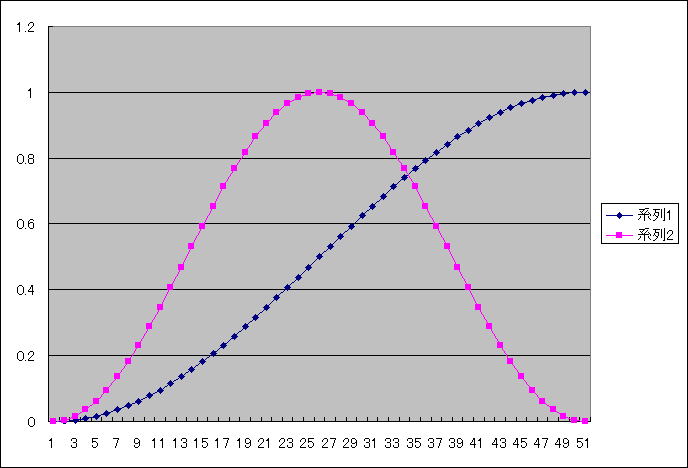
���ꂾ�ƃC���[�W���ɂ����̂ŋ�ԂɃv���b�g���Ă݂�ƁA���̂悤�ɂȂ�܂��B�ꌩ�A�����x�Ή�����O�̂����̃T�C���J�[�u�ɂ݂��܂����A�ŏ��͂��̏�ł����Ƒ����グ�āA�������낷�ꍇ�����n�_�ł����Ƒ������낷�Ƃ������ɂȂ��Ă��܂��B�O���t�̃h�b�g�ƃh�b�g�̊Ԃ��������ԊԊu�ɂȂ��Ă���̂ŁA�h�b�g���߂��قǑ��x���x���Ƃ������Ƃł��B
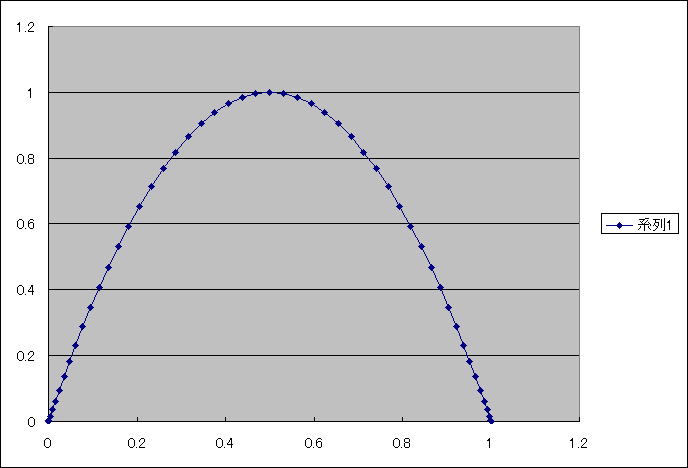
���Ȃ݂ɒP�Ȃ�T�C���J�[�u�͂��ꁫ�B�@�ŏ��ƍŌ�̕����̑��x���������Ƃ��킩��܂��B
���̊����������ĕ������Ă݂�ƁAMDF�{�[�h��ł͂Ȃ��Ȃ����C���悭�����܂��B�@�ȑO�̂�����Ƃ��葫�C���̕������ł͂Ȃ��A�J�c���J�c���ƕ����܂��B�@�J�[�y�b�g��ł��������肵�ĕ�����悤�ɂȂ�܂����B�@�����Ă��邤���ɐU�����������čŌ�͉��ɓ]�|���Ă��܂��̂ł����A�ƂĂ��ǂ������ɂȂ��Ă��܂����B
�������[�I�@������A�b�v���悤�I�@�v�������ǃf�W�J�����s���s���Ȃ̂œ���͂܂����x�ł��B
���P�O���Q�P����
����������A�b�v���悤�Ǝv���ăJ�[�y�b�g��������Ă݂�ƂȂ����肵�Ă��Ȃ��B�@������グ�������ǂ������ʂ͂���̂����A���J����قǂ���Ȃ��̂ŃJ�[�y�b�g��ł̕��s����A�b�v�͂�߁B�@�܂����Ǔ_���c����Ă���悤�ł��B
���s�̈���x���������̂͊m���Ȃ̂�MDF�{�[�h��ł̕��s���A�b�v���܂��B����70�~���ł̕��s�B
��
�Ō�A���݊O���Ă����Ă��܂��܂����B�B(^^�U
����70mm�ɂ���ƃ^�[���̏ꍇ�̕������傫���Ȃ��Ă��܂��v���O�����Ȃ̂ł����A�����I2����180�x��]�ł����Ⴄ�I�@�Ƃ��A�����I���̃J�[�u�Ȃ����̂��I�Ƃ������ŋ������Ⴄ���Ƃ�������B
����~�X���ăJ�[�u����Ƃ�����^�[�����Ă��܂����肷��̂ő���n�̉��ǂ��K�v�̂悤�ł����A�����O����Ȃ璼�i���炻�̂܂܃^�[�����Ă����肵�ĕ�����炵���͈̂��S���܂����B�����ł̑��c������I�ׂΖ��Ȃ������ł��B
���P�O���Q�S����
UMIE����ɗ���ł��������i�ƁA�������Ă����T�[�{���͂����̂œ����̑g�ݗ��āB�@����̃A�^�}�͂ł��邾���V���v���ɍ�����̂Ő����Ԃőg�ݗ��Ċ����B

�N���A�h�[���̒��ɂ̓J�����������Ă܂��B

����Ȋ����łQ���R�x�œ����܂��B�N���A�h�[�����͉�]���܂���B���̃J������������]���܂��B
�ʂ����ăN���A�h�[���z���Ɍ��x�������邩�B�@������ƐS�z�ł��B
�A�^�}���o�����̂ŁA�����J���������Ă݂悤���Ƃ��v�����̂ł����A����ς葫���̋��������邱�ƂɁB�@���c�n�̉��ǂƁA���ړ��̎��������悤���Ǝv���܂��B�@���łɐ�����s�̉��ǂ�����Ă��������ƁB
���P�O���Q�T����
���ł̐�����s�̉��ǂ��璅��B
�蔲���ŁA������s���I�������͑������҂������肪�Ɍ҂ɂȂ����肵�Ă����̂ł����A������L�`���Ɛ��ʂ������Ď~�܂�悤�ɂ��܂����B�@���Ȃ݂ɐ��璼�i�ɐ�ւ��ꍇ�́A��������O�Ɍ����Ă�����̑�����U��o���悤�ɂ��Ă��܂��B
���ɉ��ړ��B
���ړ��̏ꍇ�A�����̊Ԋu���L�����苷�߂��肵�Ȃ�������킯�ł��B�@�f�t�H���g�̑�������L���ċ��߂ā`�@�����̂���Ԍ������ǂ��A�A�A�Ƃ������A�����ƈړ������������N����̂ŃI�h���^���[���l����ꍇ�ɗǂ����A�@�v���O�����I�ɂ����i�����Ɠ����l����K�p�ł���̂œs�����ǂ��̂ł����A�@�Ⴆ�Α������߂���Ԃ�����������ꍇ��A�����L������Ԃ�������o���ꍇ�͂�낵���Ȃ���ԂɂȂ�܂��B
�F�X�Y��ŁA�ړ������Əo���̎w��̑g�ݍ��킹�ŁA����������߂�����ŕ����ꍇ�ƁA�L��������ŕ����ꍇ��I���ł���悤�ɂ��܂����B�L���ċ��߂ĕ������@�͎������܂���B
�ڕWZMP�������[�`���́A�܂������ɏo���܂����B�@���Ƀ��[�V�����������[�`���ł����A���ނށA�肪�i�܂Ȃ��B
���i�̕��s�������[�`������������Δ�r�I�ȒP�ɂł��邩�ȁA�Ǝv���Ď�������̂����ǁA����Ȃ킯�ɂ͍s���Ȃ������B�@������ƈႤ�d�g�݂����˂Ȃ�Ȃ��炵���B�@���i�A�J�[�u�A����A���ړ��@�̃��[�`���̓������l���Ă����̂���������B�B
�Y���Ƀ^�C���A�E�g�B�@�����͍�Ƃł��邩�ȁ[�B
�@
������s���璼�i�ɐ�ւ��ہA���[�V�����̈��p�������܂��s���Ȃ��ꍇ������炵���B�@PC�ŐF��ȑg�ݍ��킹�Ńe�X�g���Ă݂������Ȃ��B�@�����N�����Ă���̂��ȁ[�B�͂܂肻���ŕ|���B(>_<)
���P�O���Q�U����
�T�C�h�X�e�b�v���������`�I�@�ƁA�v������p�����s���[�`�������������炵���A2���ڂ��瑫���݂ɁB(>_<)�@�@�ł��܂������ꑧ�B
�R���g���[���̑���̊��t���ύX���āA�J�[�u�ƒ��i�m�Ɏw���ł���悤�ɂ��܂����B�@�������A���葀��ɂȂ��Ă��܂��̂ŁA���삵�Ȃ���r�f�I���B��Ȃ��B
�@
�v�Z���s�Ƃ����Ă��A����ŁA���i���s�A�J�[�u���s�A������s�A�T�C�h�X�e�b�v��4��ނ̕��s���[�`��������Ă��܂��܂����B�@�������AZMP�O�͂ł̕��s�p�^�[�������̃J�i���ƂȂ�AZMP��̏d�S�_�O���̐�������A�����_���f�������ZMP���o����A�ߕ��Z�o���Ȃǂ͂��ׂċ��ʂƂȂ��Ă��܂��B
ZMP��̐����ƕ��s���[�V�����̐����i����͎�ɗV�r�̐�ւ���V�r�̋O��������j�͕��s�̃^�C�v�ɂ���Ă��ꂼ����˂Ȃ�܂���B�@�悭�悭���������4��ނƂ�1�̊��ɂ܂Ƃ߂邱�Ƃ��s�\�ł͂Ȃ��Ƃ͎v���̂ł����A�ǂ���ɂ��Ă��v���O�����̍�荞�݂��K�v�ł��ˁB
���낻��SEMB��RPU-100�ɉ����x�Z���T�[���Ȃ���B�B�B�B�@�������RPU-100�̐�p�Z���T�[�{�[�h����ꂽ���ɑ�ւ̃Z���T�[�{�[�h����������ǂ���ŊԂɍ�����������Ȃ��ȁB������ƃf�J�C���ǁB�@���ASEMB�ɃZ���T�[����C���ǂ�ǂ�Ȃ��Ȃ��Ă����Ă�B(^_^;)
���P�O���Q�V����
�T�C�h�X�e�b�v�̃o�O�͉����B�@cygwin��Ńo�O���m�F���ďC���B�@�ł͂ł͎��@�Ŋm�F���܂��傤�I�ƃR���p�C�����Ȃ����ăv���O���������[�h�����Ƃ���A�A�A�A�����H�����Ȃ��B���[�V�����̃��[�h�Ɏ��s���邵�A�T�[�{��ON�ɂ���ƃn���O���Ă��܂��H�@�Ȃ����[�[�I
�ƁA�Y�ނ��Ə��ꎞ�ԁB�@�f�o�b�O���ɕϐ����j�^�[���邽�߂ɑ}������printf( )�����c���Ă������߂ɋN�������~�X�ł����B�@�������A�m���Aprintf��semb�p���C�u�����[�ł͖��������悤�ɏ������Ă����͂������A�A�B�@���exception�����̎��Ƀ��C�u�����[�̃��[�h����F�X�ύX�������ɃI�u�W�F�N�g�����[�h�����悤�ɂȂ��Ă��܂������H
�܂������A�@printf�����폜�����Ƃ���A�����ɓ����o���܂����B�@�ꎞ��SEMB1200A����ꂿ������̂��Ǝv���Ăт����肵�܂����B
�̂��̂��������ړ������ǁA�����ł��܂����B
�@
���āA�����܂ł͍��̏o�����B�@�����͌㑗��ɂ��Ă������璼�i�ɐ�ւ�������ɂ������ȓ�������Ă��܂����Ɏ��g�����B
�ԈႢ�Ȃ������p���t���[���̂����ɖ�肪����̂��낤�Ǝv���āA���p���t���[�������j�^�[����悤�ɂ��ē��삳���Ă݂�B�@�����璼�i�ɐ�ւ�������ɂ������ȓ���ɂȂ�B�@�E���璼�i���Ɩ��Ȃ��B�@�ӂނ��A�A�B
�X�ɂ́A����@���@�J�[�u�@���@���i�@���Ɩ��Ȃ����A�@����@���@���i�@���ƃ_���B�@�X�ɍX�ɁA���i�ɐ�ւ���Ă���3���ڂł��������Ȃ�B
�X�Ƀ��j�^�[�f�[�^�߂Ă݂��Ƃ���A���i���̈��p���t���[���ł̎p�������������B�@
�����Ƃ��ꂾ�ȁ[�B�@���i�́A�ŏ��ɍ���āA���̌�ɃJ�[�u���������������čs�����̂ŁA���̌�ɉ������v�f�����f������Ă��Ȃ����̂�������ĂƂ��납�I�H
���炵���_���������̂ŁA�������W���I�ɐ���Ă݂悤�B�@�����߂��B
�@
�W���j�[�����{�J�b�v�ڎw���Ă��낢�뒲�����̗l�q�B�@���{�J�b�v�̃G���g���[�t�B�[���������Ęb�͉��x�������Ă���̂����ǁA�ǂ��ɏ����Ă���̂��킩���̂ł��B�����ǂɖ₢���킹������̂��ȁB�@�O�O���Ă݂��Ƃ���A�A�C�{�E�̐l�`��������̂ނ��[���̃u���O�Ɂu���N�̃G���g���[�t�B�[��10���~�v�Ƃ����L�q�������܂����B���ꂪ�q���[�}�m�C�h���[�O�̃G���g���[�t�B�[�Ȃ̂��͕s���B�@�̂̓q���[�}�m�C�h�P��ŏo��ł��Ă����オ����������ˁB
���P�O���R�P����
���݂ɍs������A�o���A��Ɉ���A�v���W�F�N�g�ł��グ�ň��݂ɍs�����肵�Ă܂����B�@�����͈���C������������(�[�[;)
���璼�i�ɐ�ւ�鎞�̕s��͉����ł��B�@��͂�A���i�̈��p�����s�����̋L�q�ɂ͐�����ӎ������L�q���R��Ă���܂����B�@��r�I�����ɋC�t�����̂����ǁAZMP��̕����ɂ������悤�ɐ�����ӎ������L�q���K�v�ł������̂ɋC�t�����A�����������Ȃ��`�ƔY��ł��܂��܂����B
���łɒ��i�A�J�[�u�A�^�[���A�T�C�h�X�e�b�v�̏������ł��邾���܂Ƃ߂ď����悤�ɏ��������B�@������Ƃ����\�[�X���Z���Ȃ�܂����B���ɂ���������������������̂����ǁA�����͂܂��̋@��ȁB
����ŁA���s�̖��͂܂��͉����B�@���Ƃ͂����������ߍׂ₩�ȋL�q��lj����Ă����˂Ȃ�܂���B�@�Ⴆ�f�t�H���g�̃p�����[�^���t���b�V���ɃZ�[�u���ċN�����ɂ͂������烍�[�h����悤�ɁA�Ƃ��A�@���i�̕����p�����[�^�Ɛ���̃p�����[�^���ĊǗ�����Ƃ��B
���̏����ł������Ă���Œ��ɃX�^���X��ς��邱�Ƃ��ł��Ȃ��i���j�̂����ǁA�����������������A�����Z���T�[����̃t�B�[�h�o�b�N����������悤�ɖڕWZMP�̔��������o����L�q�ɂ��������B
��������B�����Ă���Œ��Ȃ�X�^���X��ς��邱�Ƃ͂ł���̂����ǁA�~�܂����p������{�X�^���X�ɂȂ��āA���Ȃ��Ƃ����̃X�^���X��1�������Ă���łȂ��ƃX�^���X�ύX�ł��Ȃ��d�l�ɂȂ��Ă���B�@�����t���Ȃ̂�������ƃ_���Ƃ����������B
���{�J�[�i���߂����A�Ƃ肠�����̓f�t�H���g�p�����[�^�̃��[�h�Z�[�u�Ɛ���p�����p�����[�^�̋L�q�lj��͎������Ă������B
�@
��������̐V��A�u���s�b�h�v�B�@�������ɂ܂Ƃ߂Ă��܂��ˁB���炵���o���h���ł��B�@�ł��ł��A��������̕��������Ė��߂�҂��Ă��郍�s�b�h�͖�(���o�j���Ȃ���ł���ˁB����ς胍�{�b�g�ɂ͎��o��^�������ł��B�@�܂Ƃ��Ȏ��o��^���Ȃ��Ƃ���`�����Ă���郍�{�b�g�ł��܂������B
�����_�́A�J�����͐ς�ł܂����ǁu�܂Ƃ��Ȏ��o�v�Ƃ͌����܂���B������ĉ摜�������������Ă������Ǝv���Ă����̂ł����A����X�i����Ƀf�W�J���̉摜�����ɂ��ĐF�X�Ƌ�����āA������Ƃ�����]���ɏP���܂����B�f�W�J���̋Z�p�i�f�W�J���p��pLSI�j���~��Ă��Ȃ��Ƃ܂Ƃ��Ȏ��o���Ď����ł������ɂȂ��ł��B
������ƑO���g��̃��{�b�g�Ŏ��グ���Ă����R���B�@������Ɠ��̂��m��Ȃ��ł����A����������Ǝ��o���ۂ�������邩������܂���B���肵�Ă݂悤���ȁB��������������Ȃ����ǁB
���P�P���P����
���j���ɗ\���������݂ɍs�������̂�����A�d���������ċA���Ă��Ă��܂��܂����B�@�Ƃ����킯�ŁA�����̂ł���̂��̑ł����킹�͌��ȁB(>_<)
�ƂŎd������̂͂���ŃC���Ŏd���Ȃ��̂����ǁA��Ђɏo��̂͂����Ƃ��₾�����̂ł�����Čߌ�Q���܂łɎd�グ�܂����B�ӂ��B
���܂܂ł�臒l�Ȃǂ̃f�[�^�́A�n�[�h�R�[�f�B���O���Ă��āA�ꉞ�̓R�}���h�ŕύX�ł���悤�ɂ��Ă����̂����ǁA�d�������Ȃ����ƏC���͉�������Ă���܂����B�@����͒����������ʂ�����ɂ����f�ł���悤�A���[�V�����f�[�^�Ƌ��Ƀt���b�V���ɏ������ނ��Ƃɂ��āA�����グ���ɂ̓t���b�V������ǂݏo���悤�ɂ��܂����B�@�t���b�V���f�[�^�����������Ƃ��ɂ̓t�@�N�g���[�f�t�H���g�����[�h�Ƃ���낤���Ǝv�������ǁA����̓����B
�p�����[�^�����āA�K�v�ȃp�����[�^�͂��ׂăR�}���h�ŕύX�ł���悤�ɂ�����A�g��Ȃ��Ȃ����f�o�b�O�p�̃R�}���h���������肵�Ă����̂ł����A�R�}���h�������Ȃ��Ă��܂��A�Y�ꂽ�ꍇ�Ƀ\�[�X���Ȃ���Ȃ�Ȃ��̂��A���Ȃ̂�HELP���o����悤�ɂ��悤�ƁA�A�B
����ƁA�R�}���h���n�[�h�R�[�f�B���O�Ȃ̂����ǁA���ꂶ��Ǘ��ł��Ȃ����Ă��ƂŃR�}���h���ϐ��ɂ��āA�A�ƂȂ��ύX�ʂ����ʂɑ����Ă��܂��A�t���b�V���ɏ������ގ�O�܂łœ����ς���Ă��܂��܂����B
�f�t�H���g�f�[�^�̍\���̃f�[�^����������t���b�V���̓K���ȗ̈�ɏ�������ǂݍ��肷��Ί����B
�@
����ŕ��s�Ɋւ��Ă͊����B�@���Ƃ͒��������胂�[�V�����������B�@�̂͂��Ȃ̂����A�������Ă���Ƃ������C�ɂȂ�_���V���ɔ������Ă���B
�@���܁[�ɂ܂�exception����������B�����^�C�~���O���킩���B
�A�O�i�ʼnE���V�r��������o���Ƃ��܂������Ȃ����Ƃ������B�@�Ȃ�����P�����Ă���H�@�l�W�͊ɂ�łȂ����ǂȁB�@�n�߂�1���ł܂����炵���A�����V�r����X�^�[�g���Ɩ��Ȃ��l�q�B�@�����e�����B�B�B
���P�P���Q����
�����������ŃX�^�[�g�����ꍇ�ɂ��܂������Ȃ����ɂ��āA�@�g����������Ă�Ƃ��A�_�u���ɂ��Ă��镔���̃T�[�{���Б�����ł�Ƃ��A���ׂĂ݂������Ȃ��B
�̏d���ڂ肫���Ă��Ȃ��l�q�Ȃ̂ŁA�����x�����Ԃ����E�ň���Ă�Ƃ������Ă݂������Ȃ��B
���ۂɃT�[�{�ɑ�����p�x��ƕ�l�ׂĂ݂�ƁA�@���オ�������ŃX�^�[�g�A�@�����E�����ŃX�^�[�g
���邩��ɖ��Ȃ��B�@�ڂœ���������͈͂ł́A�ǂ������X�^�[�g�̏ꍇ�̓��������C���Ȃ��B�@��肽���Ȃ��������A��l�̃p�����[�^��ς��Ă݂��B
��l�������������Ȃ�悤�Ƀp�����[�^��ς����Ƃ���A�������܂ł��������}�V�ɂȂ��Ă����B�@�ǂ����A�����̓T�[�{�̂���Ǝv���܂��B�@����A�܂��߂ɍl����ƃT�[�{���ɕ�l�����Ȃ���Ȃ�Ȃ����Ă��Ƃ���Ȃ��B�@�z���g�͂��ꂪ�����Ȃ낤���ǂȁ[�B
�Ƃ������ƂŁA�E�X�^�[�g�ł����X�^�[�g�ł���肪�Ȃ��悤�ȃp�����[�^��T�����ƂɂȂ�܂����B�@0.000117�@���@0.00008�@�ɁB�@�������ŃX�^�[�g���Ă������Ă��邤���Ɉ��肵�Ă��銴���ł��B�@���̏�Ԃɂ���Ă��e�������ł����A�܂��ǂ��ł��傤�B
���P�P���R����
�������H��c���Փ��u�ł���̂��I�v�ɂ���`���X�^�b�t�Ƃ��ĎQ�����Ă��܂����B
1�N�O�Ɣ�ׂ�ƁA�ԓ����܂������ɕ����郍�{�b�g���������I�@����͋Z�p�I�i���ł���ˁB�����Ɋ������Ă��܂����B

�A�j���C�_�[�������Ƃ������ƂŁA���Ȃ����̌��ɂ��ĐF�X�����Ă݂��̂ł����A�A�A�b���������z�Ƃ��āA�Ȃ�Ă������A�z�r�[���{�b�g���č��������t�������Ǝv���܂���B�u���C�N����̂������Ɠd�̒��ԓ��肷��̂�������̂��Ƃ��Ǝv���܂��B�@���{�b�g�o�g�����e�P�̃|�W�V�����ōs���邽�߂ɂ͊�ƃx�[�X�ł̎����ƋZ�p�͂��K�v�����A10�N�₻����ŗ����オ��͂����Ȃ��B�@�Z�p�͊m���ɐi�����Ă܂����A���̐���i�����܂��B
�����Ƃ��Ďv���̂́A���{�b�g�o�g���̐��E�Ƀ\�t�g�E�F�A�I�v�f�����Ȃ����Ƃ��c�O�ł��B�@�t�̗�ł̓��{�J�b�v�i�q���[�}�m�C�h���[�O�j�ɂ͋@�B�H�w�v�f�����Ȃ����ă��{�b�g�̐i����j�Q���Ă���Ǝv���܂��B�@�����̃X�^�b�t�������`�[����オ�����̂͂��̂��߂��Ǝv���܂��B�@�K���[VS�T�A�K�������ƁA�����\�t�g�E�F�A�Ȃ��ł̐��E���i�݂���������Ă銴�������܂����ǂˁB�@�ʐ��ł���������Ƒ��x�𗎂Ƃ������C�������Ȃ����Ƃɂ̓\�t�g�E�F�A�����ɉ��������{�b�g�o�g���̐��E�͖K��Ȃ���������Ȃ��ȁB
�}�C�R���̓o��ŃR���s���[�^�̉\���ɂ��̂����������������Ă��̍����烍�{�b�g����낤�Ǝv�������]�Ȑ܂��܂������ǁA���ꂩ�����30�N���o���Ă��܂��܂����B�@30�N�o���Ă���Ƃ��̒��x�A����ł����h�Ȑi���𐋂��Ă���Ǝv���̂ł����ǂˁB�@�܂��܂����ꂩ�炢�����̋Z�p�I�u���C�N�X���[���}���˂��炵�����E�͂���Ă��Ȃ��Ǝv���̂ł���B
���P�P���T����
�T�[�{�̓�����CW��CCW�Ő����ƈႤ�炵���B�@�������|�e���V���Ő��䂵�Ă���ʒu���x�͂悵�Ƃ��āA�g���N�|���x�����Ȃ͌��\�Ⴄ�炵���B�@�L�r�V�C���[�V��������ĂȂ���������Ȃ������ȁ[�B�@�Ƃ������ƂŁACW����̎��̕�ʂ�CCW����̎��̕�ʂ�ς��邱�ƂōĐ����x�̂�����}�����邩������Ȃ��B
���ƁAZ���̕��ׂ��L�����Z�����郂�[�V�������������̂����ǂȁB�@�ǂ�����Ⴂ����B
�@
�G���B
ZMP�O�͂̕��e�������ł����̂ł����ȃ��[�V�����ɓK�p�ł��Ȃ����ȂƁA�v�Ē��B
ZMP���W�Ƒ��̈ʒu�ƁA���̌����ʼn����g�S�̂̃��[�V�������ł���悤�ȋC�����Ă����B�@�_���X�Ƃ���点��̂��ꋻ�����B
���ʁA���s�������Ⴞ�߂���ȂƎv�����Ƃ�����B�@���{�b�g��i��������ɂ͂ǂ��������[�h�}�b�v���K�v�Ȃ̂��܂��߂ɍl����ׂ��Ȃ̂��낤�B
�l�H�m�\��肽����肽���Ǝv���A�o�Ă���A�C�f�B�A�͕��s�Ɋւ�����̂���B�B�@�A�^�}�ɕ肪�B�B
�@
�Ƃ��l���Ȃ���d������A���Ă����̂����A�����ς�������ċA���Ă���������Ȃ�ɂ����Ȃ��Ŗ���ǂ�ʼn߂����Ă��܂����B(>_<)
���P�P���U����
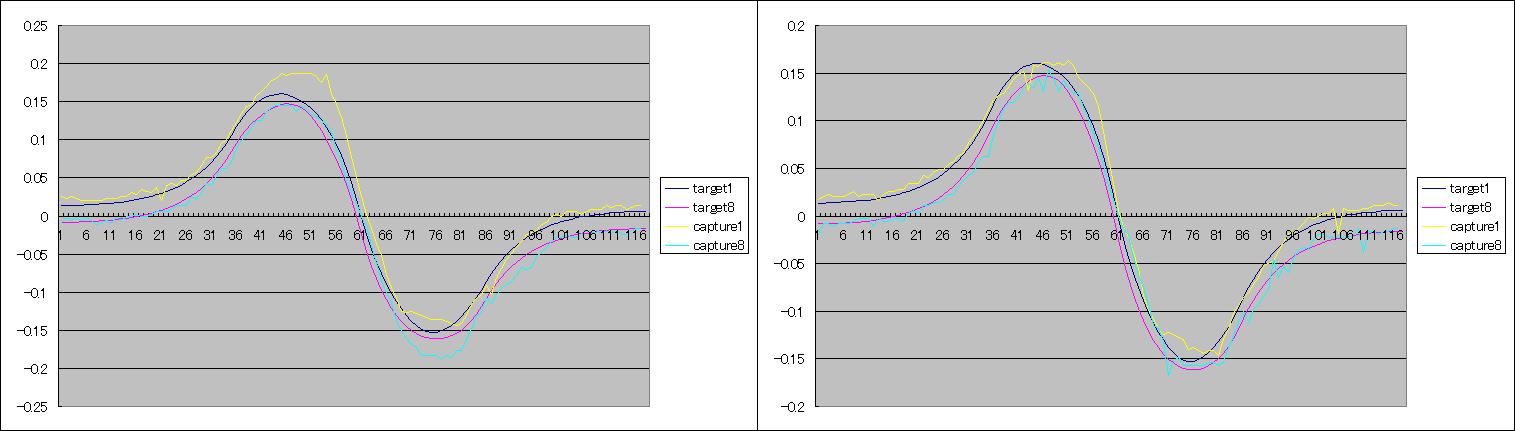
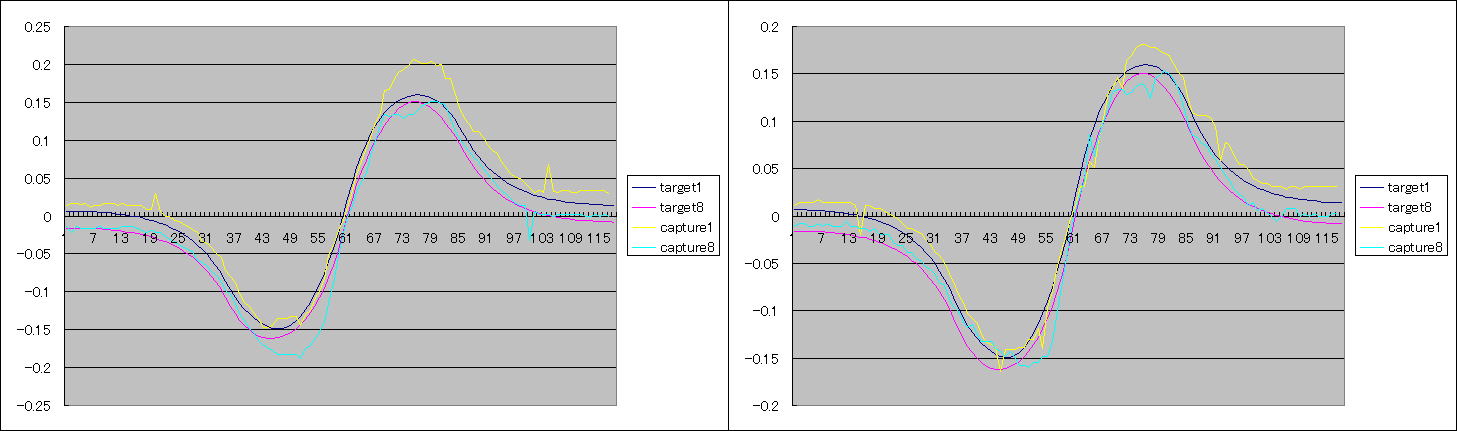
��ʃp�����[�^��CW�p��CCW�p�ɕ����āA�l�����s���낵�����ʁB
����ŁA�ǂ���̑����o���ɂȂ��Ă������悤�ɕ�����悤�ɂȂ�܂����B�@���̏�Ԃŏ����l�q�����Ă݂܂��傤�B
CW�ƁACCW�Ƃ������ƂȂ̂ŁA�p�x�̃J�[�u�����̏ꍇ�Ƃ�����̏ꍇ�ŁA�����ׂɑ����l���ς��Ƃ������Ƃł��B�@�Ȃ̂ŁA��肪���������E�����X�^�[�g�̕�l���ς���Ă��܂��B�@�S�̓I�ɕ�l���傫�����������̂�������Ȃ��ȁB
���P�P���V����
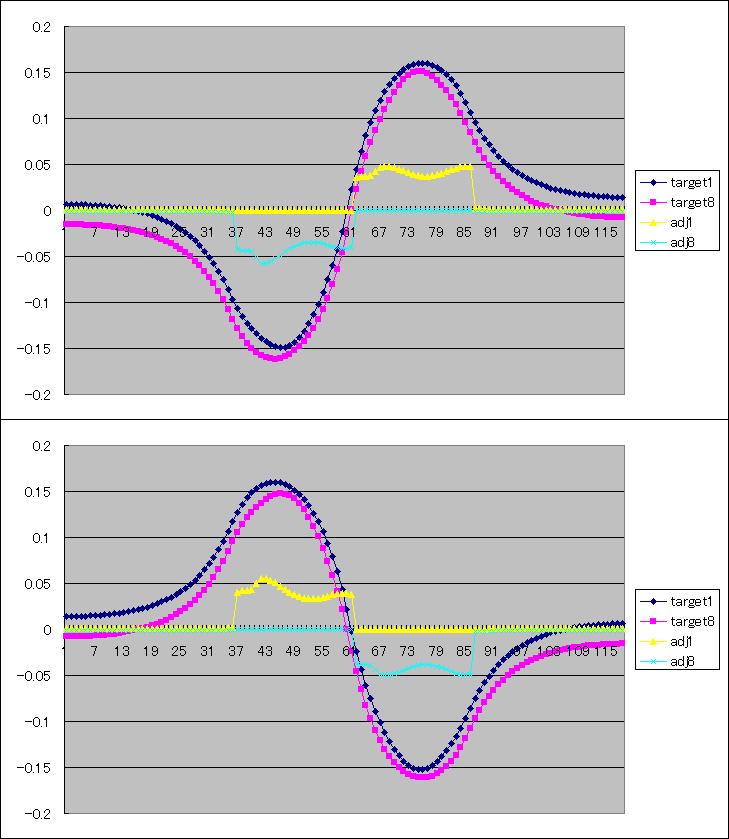
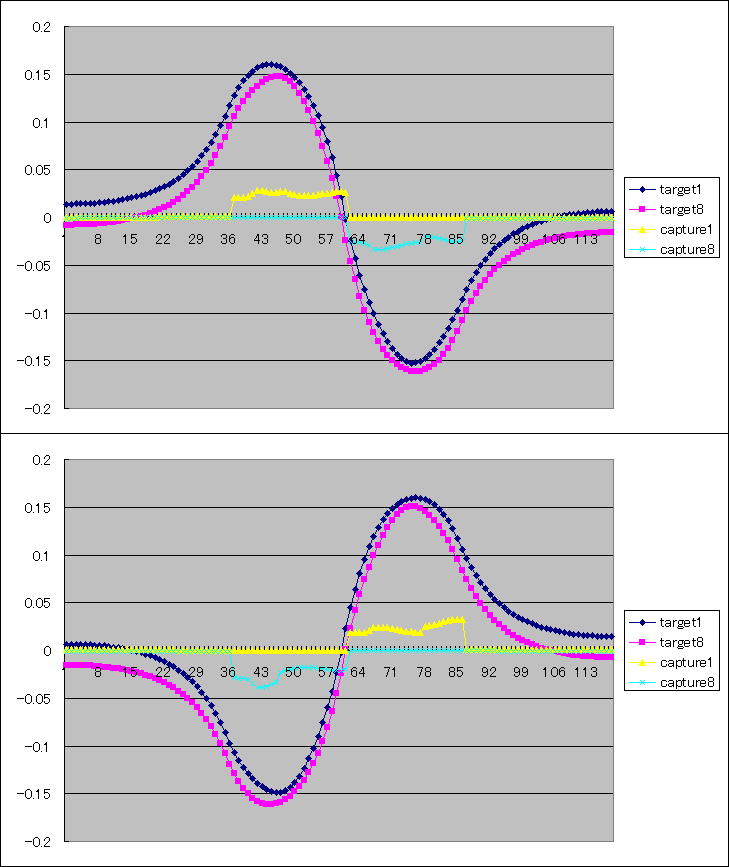
�T�[�{�����ɂ����͉��������߂��悤�Ȃ̂ŁA�v���o�����悤�ɍĐ����x�ɂ��Ċm�F���Ă݂邱�Ƃɂ��܂����B�@��l�̌�������鎞�ɁA��O�̃f�[�^���L���v�`���[����������A�����������Ԃł̍Đ����x�̊m�F�����Ă��܂���ł����B�@�����ڂɌ��ʂ��������̂Ő�ɐ�ɂ����Ⴂ�܂����ˁB
�܂��A�E�������ŃX�^�[�g�̏ꍇ���@������Ȃ��A�E������������ꍇ�ł��B
�L���v�`���[�ł͎w���l��傫�������Ă��܂��Ă��镔����������������ƂŒׂ����߂Ă��܂��B�@���ꂭ�炢�̘c�݂Ȃ�Ȃ�Ƃ�������悤�ł��ˁB
���ɁA���������ŃX�^�[�g�̏ꍇ��
������́A���P�͌����邪�A���S�ɂׂ͒����߂Ă��Ȃ��ł��ˁB�@�����������傫�߂ɂ��Ă��悳�����ł��B
�ł��A�E�������X�^�[�g�ł�2���ڂƁA���������X�^�[�g�ł�1���ڂ́A�قڏ����������Ȃ̂Ɋւ�炸�I�[�o�[�V���[�g��ɐ����ƍ�������܂��B�@�܂����̗v�f������Ƃ������Ƃł��B
���P�P���X����
���̓y���A�J�����������I�@�ƈӋC����ʼnƂɋA���Ă����̂ł����A�W���J�[�i�o��̂��߂Ƀ��[�V�����G�f�B�^�̉��ǂƁA�P�[�u���̐��������Ă���܂����B�@�i�l����Όv��ʂ�ɃJ���������Ă����悩�����B�B�B�j
�P�[�u�����������Ă��āA�ǂ����Ă����Օ����Ɍ����J���ăP�[�u����ʂ������Ȃ��āA�����g�����Č����������B�@�P�[�u������Ɉ���������Ȃ����x�ɂ͐������邱�Ƃ��ł��܂����B
�Ƃ��낪�A�@�g�ݗ��ĂȂ����ĕ������Ă݂�ƁA�Ȃ��������H�H�H�@�S�R�����Ȃ��Ȃ��Ă�I�@�������Č����Ă��Ҋ߂���O�������x�Ńo���o���ɂ����킯����Ȃ��̂ɁB
�T�[�{�̃g�����ݒ�̃v���O���������܂��������A�T�[�{�Ƀ��Z�b�g�����������肷�鎖�̂��������邽�߂Ƀg������SEMB���ŊǗ�����悤�ɉ��������Ƃ��Ƀo�O��g�ݍ����H�@�l�W����߂Ȃ������������ς�������炩�H�@�p�����[�^������������A�v���O����������������B�B�B
�����������Ē������Ȃ���������Ă���Ƃ��A��������]�|�����Ă��܂����B�@���̎��A�A�w���ɔw�����Ă���RPU-100���C�X�̑������ɒ����I�I�I�@��ׁ[�I��ꂽ�����B�@�Ǝv���Ċm�F����ƁA�A�A�ARPU-100�Ɏ��t���Ă��閳��LAN�@CF�J�[�h���Ȃ����Ă�B�Borz�@�@�������Ǝv������ˁB
����m�F����ƁARPU-100�͖����B�悩�����[�B�@�ł��A�����͐ڑ��ł��Ȃ��B�@�L���J�[�h�ɐ�ւ��Ă݂�Ƃ����ƂȂ���Ƃ�����݂�ƁA����ς�J�[�h����ꂽ�炵���B�@���̃J�[�h�͂Ƃ����ɐ����I���B�@������ɓ���Ȃ������B�B�@��������ƁA������RPU-100�͂�������ɂȂ��Ă��܂��B�@���t�I�N�Œ��ׂ�ƁA�������I�W�����N��1200�~�B�@���Ãh���C�o�[�ꎮ��3500�~�Ŕ����Ă�B�@���̖���LAN�J�[�h�͑����Â��̂����A�V�O�}���I�������Ȃ��ɂȂ���炵���Ă܂������������\����炵���B�@�悩�����[�B�@�Ƃ肠�����W�����N�_���Łi�W�����N�Ƃ����Ă�����m�F�����Ȃ������A�Ƃ�����������M���āj�@���Ƃ����Ǝv���ďI�����Ԃ�҂��ƂɁB
�E�E�E
����2���Ԕ��Ƃ������ƂŁA���C��������h���}�����肵��PC�O�ɖ߂�ƁA���ɃI�[�N�V�����I���B�@�Ȃ����1���Ԃ��炢���ԊԈႦ�Ă邵�B(>_<)
����3580�~�Œ��É��̏o�i���𗎎D���܂����B�@�܂���ɓ��邤���ɂ���1�����炢���D���Ă������������������B
����LAN�J�[�h�̖��ʎ��ɂ́A�����ւ̋��P�Ƃ��āA�A�A�A���͕��s���B�@���������Ԃ���ق߂Ă��ꂽ�̂ɃR�����Ⴞ�߂���B
 �@���@�߂���CF����LAN�J�[�h
�@���@�߂���CF����LAN�J�[�h
�@
��ӂ͒��߂āA��ӎ��Ԃ�u���đ���l���邱�ƂɁB
���ǂ́A�v���O�����̕ύX���e���炷��ƃo�O�̍�肱�݂͍l���ɂ�������A���J���^���ׂ����낤�ƁA�@�@�l�W�ɂ݁i�������̓l�W���߂����j����A���Ƀg�����̊m�F�Ɛi�߂邱�ƂɁB
�g���������p���ŗ������Ă݂�ƁA�ȁ[�߂ɗ����Ă���C�����č��E�̑��̒����𑪂��Ă݂��2�~�����炢�������Ⴄ�B�@�����I�Ȃ�ł��H

���ǂ͒�����������̃g�����������Ƃ���Ă��邱�Ƃ����o�B�@�g�������ĕ������Ȃ��Ă�����Ă�����̂Ȃ̂��ȁH�@�����N�r�����̓T�[�{���_�u���ɂȂ��Ă���̂ŁA�Б��̃T�[�{�̃g���N���ăg���������B
�Б��̃T�[�{����g���N���ƌ��\�p�x���ꂪ����܂����B������Ē������āA�����葫�̒����������悤�ɂȂ�܂����B�@�܂������N���̂����Б��̒������I����Ă��Ȃ��̂����Lj�U�������Ă݂邱�ƂɁB
����ƁA�������I�@���Ȃ����܂ł̕��s���߂��Ă��܂����B�@����͐���ƕs����ł������肵�Ă����̂����A��������ƈ�������߂��܂����B
���Ⴀ�A�c��̃T�[�{�������B�@�ƁA�@�����N�̑��������l�ɒ��������Ƃ���A�@�܂������Ȃ��Ȃ��Ă��܂����B
����͎��̓����N�̐^�����B�@�݂��ɒ��ߕt���������Ƃŝh�R�i�������H�j�Ɠ��l�ɍ��������܂�̂ł��B�@���̍����̂��A�ŕ����Ă������Ȃ��B�B�B�м��
�����T�[�{�̃g��������������������܂�������悤�ɂȂ�܂����B�@�فB(*^_^*)
�@���}���u�I�ɃN�b�V������w�������B�@����̃E�F�C�g�T���˂Ȃ��B

���P�P���P�T����
�v���Ԃ�̓����X�V�ɂȂ��Ă��܂����B
���j���ɁA���������Ȃ������s�������������Ƃ��Ȃ�炩�̂��������Ȃ̂��A�߂��炵���A���݂̗U�������X�ƕ�������ł��Ė����̂悤�Ɉ��݂ɍs���Ă܂����B
�y�j���ɂ͗��K��ɍs�����肾�����̂ŁA���̎��܂łɂ͋�������Ƃ���������̋N���オ�胂�[�V����������ăR���g���[���Ɋ���t����Ƃ����̂���낤�Ǝv���Ă����̂����A�܂������o�����B
���ׂ����Ƃ͂͂����肵�Ă���̂ŁA���K���ŊȒP�Ƀv���O�������Ă��܂����Ƃɂ��Ă��܂����B����̗��K��͐��Ȃ̂ŁA�����S�n����H�ׂĂ��炾�炵�Ă���ו��܂Ƃ߂ďo���B�@�ŋ߁A���K��ɍs���Ƃ��Ɏg���Ă��鉩�F�̃L���X�^�[�o�b�O�B�@������ƑO�ɐV�������L���X�^�[�o�b�O�Ȃ̂ł����A�L���X�^�[������Ă��܂��Ă��܂����B�@1���~�ȏシ��̂ɁA���ꂾ���Ŏ̂ĂĂ��܂��̂͂��������Ȃ��̂ŁA�����O�ɁA�n�g�����O���ĊO���̃L���X�^�[�ƌ������ĕ��������܂����B
���̏C�������L���X�^�[�o�b�O�ʼnw�Ɍ������r���B�Ȃ��A�ו����d���Ȃ��A�A�A�Ǝv���ăL���X�^�[������ƁA�����Б������Ă��܂��Ă���B(>_<)�@�����A�A�ԗւ����Ȃ��č��Ă��܂��Ă��B�B�@�o�������ɂǂ�`��Ɨ�������ł��܂��܂����B
������x�͏C���ł��邩�炢�������A�@���̃o�b�O�Ƀ��{�b�g�@�ނ͏d�������Ȃ��A�Ƃ��l���Ȃ�����w����S���S���ƃo�b�O�����������Ă��đ厖�Ȃ��ƂɋC�������B�@PC��AC�A�_�v�^�[�Y�ꂽ�B�B�B�@orz�@�@�@�������Ƀv���O�����͂ł��Ȃ��ȁB�@�����_���N������̂ɂ��R���\�[�����v��̂ł܂��܂��e���V�������������Ă��܂����B
���K��ł́A�����O�ŕ������Ă݂��̂����A�v���̂ق��܂����������Ȃ��B�@�Ȃ_�����Ȃ��B�@���ƁA1��0.5�b�̕��s���Ƃ���ϒx���ł��ˁB���̂����v�Z���s�̏����ƏI�����[���Ōv�Z���Ă���W�ŁA�����͂��߂ƕ����I�肪�̂�т肵�Ă���B����������ƂŃS�[�����N�̍U�������炤�Ƃ��ł����B���ԂȂ����ԂȂ�(^_^;)
����{�Z���̓c�����L���p��6�����{�b�g�������Ă��Ă��܂����B�V�O�}�͌v�Z���s�ŕ��s���[�V���������Ă����̂ŁA�o���Ă��܂��ΊȒP�������̂����ǁA6���̃��[�V�������G�f�B�^�ō��̂͌��\�ʓ|�ł��B�ȊO�Ǝ��R�x���������̂���������ȓ_�������肵�܂��B�@�ł��A�c������̒���A6�����{�b�g�^���N�ł�BB�e�����������Ėʔ������B�@�I����Ă��Ђ��܂��傤�B(^�E^)�@BB�e�̏e�����Ă��Ȃ���B�@�Ƃ���łǂ��Ŕ����Ă��ł����H
�V�O�}�����ƂȂ�ƁA��肪�B�@�V�O�}�̃��[�V�������������Ă���SEMB1200A�́A���̓����_��}�[�L�����[�ŃJ���J���ƌv�Z���Ă܂��B�������𗧂Ă���������������Ƃ����Ă�SEMB2�����̂͂������Ȃ��B�@�Ƃ肠�����V�O�}���������x�̌v�Z�Ȃ�����ƒx��CPU�ł��ł��邾�낤����ACoron���炢��CPU�{�[�h��p�ӂ��ē����������Ǝv�����肵�Ă��܂��B�@BeagleBoard�œ��������͊ȒP���������B
�@
���āA�����i15���j�͍���ł��Ȃ��������Ƃ�S�����˂Ȃ�Ȃ��B
�܂��̓��[�V�����N�����R���g���[���Ɋ���t����B�@����A�t���b�V���ɏ�������Ōォ��ς�����悤�ɂ��ׂ�����ȁB
���Ƃ̓G�f�B�^�[�̉��ǁB�@�g���Ă݂�ƐF�X�ƕs����o�Ă��ĉ��ǂ��Ȃ��ƃ��[�V�������̂��ʓ|�Ŏd���Ȃ��B�@�蔲���̏�Ɏg���₷�����Ă̂͂�����Ɠ���ł��ˁB
�����āA�X�Ƀg���������B�@�����N������߂���ĂƂ���ł����A���ߑ�����Ă���T�[�{�ł����A�S�ăg�����O�̏�Ԃł��B�@���́A���q�������E���̓g�����O�Œ��ߑオ�����Ă���̂ɒ��q���ǂ��Ȃ������̓g�����O���ƁA���ߑオ�ɂ��B�@�������̑������߂Ȃ���ȁA�Ǝv���Ă����̂����ǂ܂�����Ă��Ȃ������B
�����ɒ��ߑ�����āA�X�Ƀp�����[�^�����ĕ��ו�ʂ𑝂₵�Ă��ƁA�����Ƃ悭�Ȃ�܂����B�@�̏d�̈ړ����o���Ă��銴�������A���i�����オ�����B�@�����O�œ�������ǂ������������ǁA������͂悭�Ȃ����͂����B
�Ƃ̊�����0.4�b�ł������銴���B�@���i��0.4�b�y�[�X�ōs���Č��悤�I
����őS���������Ȃ��`�B�@�ȂY��Ă��邩���B
���P�P���P�U����
�T���̃W���J�[�i�̗��K���i���u���O�ɃA�b�v����Ă܂��B�@�݂�ȑ����ȁ[�B�@���悩��t�@���g���̃y�[�X�𑪂��Ă݂�ƁA1����0.3�b�B�@�����Ƀ����_�̌v�Z���s��1��0.3�b�ɐݒ肵�ĕ������Ă݂�ƁA�A�A���[��A�����Ȃ����ǁA���ꂶ��₾�ȁ[�B�@����ς�ō�����1��0.4�b���ĂƂ��ł��B���Ƃ͕������ǂꂭ�炢�L�����邩���ĂƂ��ł����ˁB�@�ڕW�́`�A�R�����ĂƂ����ȁ[�B�@
�����A�x�ݎ���Ă�ڂƂ܂ɗ��K���ɍs�������Ǝv�������ǁA�ł����킹���������̂Ŗ����B�@��̂ɂ��ČߑO���܂ł��Ƃ�����Ɩ������B
�@
��ف[���N�P��J�ÂɂȂ��āA�P���̊J�Â��Ȃ��Ȃ��Ă��܂��܂����B�@�����Ń_�b�V��2000���x���W�܂ł���1�������A�Ǝv���Ă����̂Ɉ�C�ɔ��N�L�т܂����B����́A�A�ǂ���������낤�ȁB�@�����Z���T�[�����ăZ���T�[�t�B�[�h�o�b�N�̌��������ׂ����APICO-ITX�������_�ɐς�Ől�H�m�\�̊J���ɒ��肷�ׂ����A��ߋ������ꂽ�����g�\���̌����Ɏ��g�ނׂ����A�@�͂��܂��V�O�}��BB�e���f���K�������t���ėV�Ԃ��B�@�Y�܂����B�B
�����͔��Y�ƌ��{�W���ł̃��{�b�g�R���e�X�g�B
�W���J�[�i�łR����_���Ă��āA�R���ł����猈���Ɏc���Ă��܂���������Ȃ��̂ŁA�U�����[�V�������ۂ����̂܂ŗp�ӂ��Ă����܂����B
���ʂ͗\�I10�ʂŗ\�I�����B(^^�U�@�o�g���ł��郍�{�b�g����Ȃ��̂ł܂��������ǁA����������Ə�ʂɓ���邩�Ǝv�������ǂȁB�@�ŏI�I�ɃR�[�X�ł̗��K���o���Ȃ������̂ŁA������}���C���ɂ����ݒ�Ŗ]�̂��s���ł��B�@���ƁA���������̐ݒ������Ă��������ǁA�тт��Ďg���Ȃ������B

�Q�������ł��Ȃ������͎̂c�O�����ǁA�v�Z���s�ŃC�x���g�ɎQ���ł��Ă悩�����B
������RPU-100���̂����₾�����̂ŁA�_�~�[�̃S���N�b�V������w�����čs�����̂����ǁA�A�^�}���Ȃ��̂͂��т����̂ŁA�J�����͓��ځB����������3���~���炢�͊|�����Ă邩�猋�\�����ȏ��肾�B(^_^;)
���[�X�o��O�̒������ɓ]���Ă��܂��A�L���m�s�[������Ă��܂����B�@�f�r���[�O�ɏ����ɂȂ��Ă��܂��āA���ꂽ�L���m�s�[�ŏo�ꂷ��H�ڂɁB�@�ł��A�J������T�[�{�͖����������̂ŃI�b�P�B�ł��B
�Q���܂Ƃ��āu�����Ƃ��v��������Ă��܂����B�@���͂����Ƃ��͑�D���ŁA��Ɏ��ƐH�ב����Ă��܂��̂Ŏ���I�ɕ��Ă��邨�َq�̈�Ȃ̂���������Ă��܂������炨�����������������Ƃɂ��܂��B(*^_^*)
����ɂ��Ă��g�c����̑��c�͂��炵�������B�@�K�[�S�C���̋��̂������ɂ���肫��܂����B�o�X�̉^�]����ł��B�_(��o��)�^�I