�J������(31)
�g�b�v�֖߂�
�J�������C���f�b�N�X��
�O�̃y�[�W��
���W���W����
���C�g�V���[�Łu�A���G�b�e�B�v���ςĂ�����ł����A�@����ł��ˁB�@�Ȃ�肪�U�c�Ȋ����B�@����オ�炸�ɏI�����������B
�@
����σX�g���b�`���厖�����Ă��ƂŁA�X�g���b�`�ݒ�R�}���h�𑗂荞�߂�悤�Ƀv���O�������C�����܂����B�@�Ƃ肠�����A�X�g���b�`��ς��ĕ������Ă݂��肵���̂����ǁA����܂茰���ȍ��͂Ȃ��Ȃ��B�@�������邭�炢�ɃX�g���b�`���ɂ�����ƕ����Ȃ����B
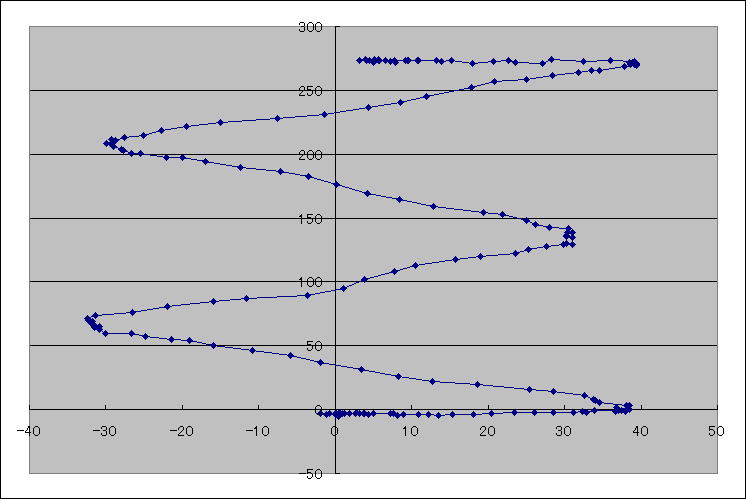
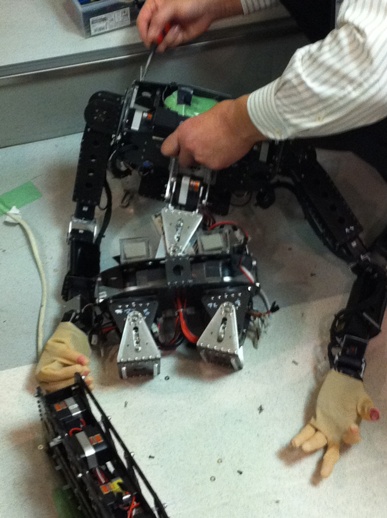
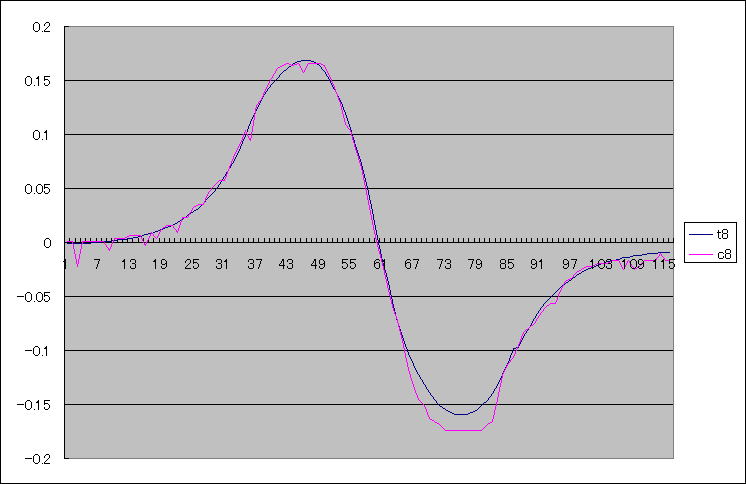
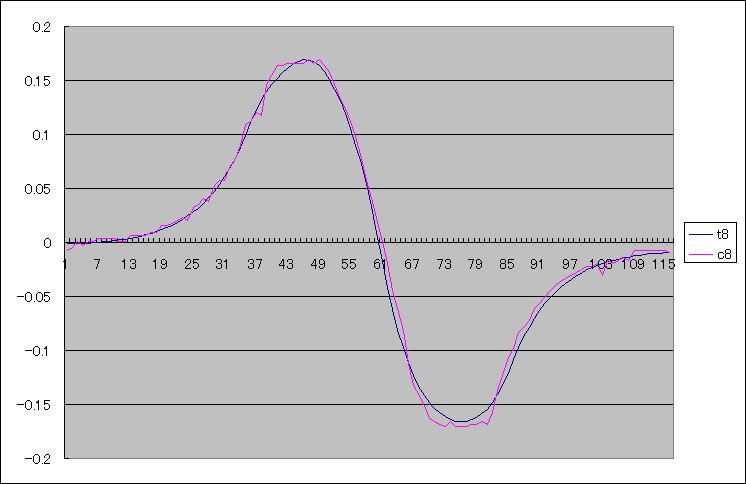
�X�g���b�`�̑����͂܂����̂����ɁB�@�L���v�`���[�����ߊp�x����ZMP���v�Z���Ă݂܂��B
���ꂪ���{�b�g�̏d�S�̋O�ՁB�@
���Ă��ꂩ��ZMP���v�Z������Ă��Ƃ́A�����Ȃ����ȁ[�Ǝv���n�߂����ǂ���Ă݂���B
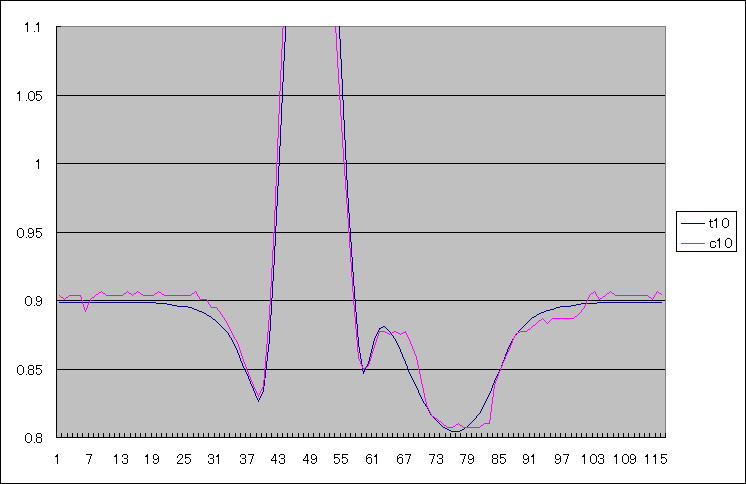
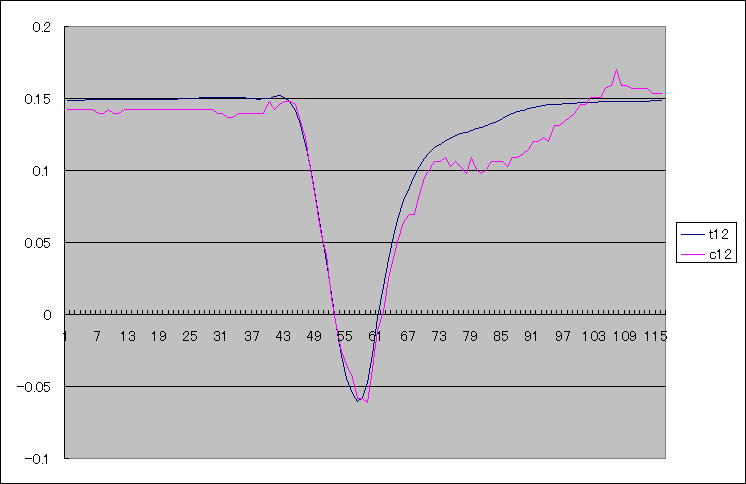
�����x�����Ȃ̂ɁA����Ȃɂӂ�ӂ炵�Ă���_������Ȃ��B�@���Ȃ݂ɗ^�����p�x��Ōv�Z����ƁA
����̓J�[�u���s�̃f�[�^�ł����A������ւ�莞�̃X�p�C�N���L�邯�ǁA�܂��܂��B�B
�L���v�`���[�f�[�^�̓m�C�Y�������萸�x��������łӂ���Ă���̂œ������x�ł̌v�Z�͂ł������ɂ���܂���B�@�^�l��m��ɂ̓L���v�`���[�f�[�^�ɃJ���}���t�B���^�[�ł������Ȃ���_���Ȃ�X���ˁB�@���Ȃ݂ɊȒP�ȃm�C�Y�t�B���^�[�������Ă݂����nj��ʂȂ��ł����B
����̃X�g���b�`���������āA�����Z���T�[�ő������ڒn���Ă���̂��m�F���Ȃ���ߊp�x����ZMP���t�Z���ăt�B�[�h�o�b�N���������Ȃ����ȁA�Ǝv�������_�����ۂ��ł��ˁB
���W���Q�Q����
�����Ԃ�ƍX�V���ĂȂ������ȁ[�B�@������Ƌ����B
�d�����R�ꂾ������A�A�Ȃ��Ă���A�����Ăւ�ւ낵�Ă���A�X�ɂ̓����_�͎�l�܂芴�������ĂȂɂ���Ă����̂��킩����Ń��`�x�[�V���������������肵�Ă܂����B
�@
�C���t���ƂW�����㔼�B�@���{�ŃT�o�Q�̑��X���P�P��������̂�������ς�Q���ł��邩�ǂ��������B�@�����Colon�̊J������V����PC�ɃC���X�g�[�����ĂȂ�������B
�Ƃ������ƂŁAEclipse�Ƃ�Dfuse�Ƃ��̃C���X�g�[���ƑO��PC�ŊJ�����Ă����v���W�F�N�g�̈ړ]�Ȃ�������Ă܂����B
�v���W�F�N�g�̈ړ]���悭�킩���ŁA�V����PC���ƃr���h���ʂ�Ȃ������肵�Ă�����₵�Ă܂������A�Ȃ�ƂȂ������B
���Ƃ�Dfuse�B�@STmicro�̃z�[���y�[�W����ŐV�ł��_�E�����[�h���ăC���X�g�[���B�@�Ƃ��낪Dfuse�h���C�o�[�̃C���X�g�[���Ɏ��s�B
�C���X�g�[�����悤�Ƃ���ƁA
�u���݂̌���ł́A�f�o�C�X �h���C�o�̃C���X�g�[�� �E�B�U�[�h�̓T�|�[�g����܂���B���̃p�b�P�[�W������������ɖ₢���킹�Ă��������B�v
�Əo�Ă��܂��B�@�@����።�����ȁ[�A�܂���Windows7�i64bit�j�ɂ͑Ή����ĂȂ��̂��A�Ǝv�������h�L�������g������ƑΉ��͂��Ă���l�q�B�@�܂���{�ꂪ���炵���B
���ׂ��Ƃ���A�h���C�o�[�̃t�H���_�[�ɂ���dpinst.xml�t�@�C�����̌���L�q�@<language code="0x0409">�@���@<language code="0x0411">�@�ɒ��������悤���B
����Ŗ����v���O�������������߂�悤�ɂȂ����̂����A�ړ]�����v���W�F�N�g����r���h�����v���O��������������ł��V�O�}�������Ȃ��H�H�H
�O��PC�Ɏc���Ă����o�C�i���[���������ݒ��������Ɠ����̂ŏ������݊�����Ȃ��ăR���p�C�����ɖ�肠�肩�H�H�@�܂��̓\�[�X�R�[�h�ɖ��H
�����ɊȒP�ȃv���O�������r���h���ď�������ł݂���A�����Ɠ����Ă���l�q�B�@�\�[�X�R�[�h���������������ȁ[�H�H�H
���W���Q�X����
�����ɏT���ɂȂ��Ă��܂����B�@orz
�v���Ԃ�ɓy���x�݂ƂȂ����B�@���̓y���̓��{�����Ȃ�ł��ˁB�@�U������̑���ɂ��ƂȂ����D�����ꂽ�悤�ŁA���߂łƂ��������܂��B�_(~o~)�^
�@
�y���C�����ŃV�O�}�̑�������낤�Ƃ��Aeclipse���C���X�g�[�������̂͂����̂����A�v���W�F�N�g�̈��z�����I���Ȃ��B�@�����s���̃R���p�C���G���[���o�Đ�ɐi�܂Ȃ��B�@�V�O�}�ɂ��Ă͉����ς��Ă��Ȃ��̂Ƀv���O�����̓E���Ƃ��X���Ƃ������Ȃ��B�i���Ȃ݂Ƀr���h�͂ł���j
�U�X�Ɏ��s���낵���Ƃ���A�v���W�F�N�g���ɑS�p�������g���Ă���Ƃ������Ȃ��ƂɂȂ�炵���B�@���������̂��ăf�B���N�g�����Ɋ����g���Ȃ�[���Đ̂��猾���Ă܂������ǁA�����ɂ���ȁB
�����āA�̐S�̃V�O�}�̕��́A�������q�������ɕϐ����g�������������_���Z���g�����ꍇ�ɂ��������Ȃ�炵���B�@����X���ĎU�X�Y��ɁA��������e�N�m���[�h�̌f���ŕ��������_���Z���ł��Ȃ����Ď��₪�������悤�ȁB�B�B�@�@���ǁA�O�̃o�[�W�����Ɠ����Ή��i���C�u�����̎w��j�ʼn������܂����B�@�o�[�W����������������C���͐܂荞��łق��������ł��ˁB
�@
�����V�O�}�������o�����B�@�A�i���O�W���C�X�e�B�b�N�őS���ʂɓ����悤�ɍ���Ă���̂�����ǂ��A�������Ă݂�Ƃ܂��������ȋ����������炩�c���Ă�B�@�܂��܂��o�O�����ȂȁB
�ł��ACoron�ł��̃f�o�b�O����ɂ͂�����Ɗ����キ�Ă炢�B�@���l�o�͂����ׂăX�N���b�`������printf�����g���Ȃ��B�@�R�}���h�̌n�������_�Ƃ��킹�����̂ŁA���łɃR���\�[�����j�^�[�ւ̃e�L�X�g�o�͗p�o�b�t�@������Ă܂����B
���X���U����
�c�ƂŒx���A�邩�A���������ċA���Ă��邩�B�@����ɍ��T�͂܂��y�j�o�A���j�����C�x���g�ʼnƂ��Ă܂����B
�Ȃ̂ő債�����Ƃ͂ł��Ă��Ȃ��̂ł����A�@�����_�ŁA�T�[�{�ɃX�g���b�`�ݒ�����錟���ŁA�X�g���b�`�������Ղ��Ȃ�悤�ɂƂ������Ƃ�4014����4013�ɐ�ւ��Ă݂܂����B�@�s�b�`�������ˁB
ID���ԈႦ���̂�ID���C�����˂Ȃ�Ȃ�������ŁA���Ԃ��������Ă��܂����B
�������Ă݂��Ƃ���A�Ȃs���ȓ���������H�H�H�@����ꏊ�ŃJ�N���Ƃ��������|���肪����B�@���ׂĂ݂�ƉE���̑�ڃs�b�`�T�[�{�̑O�����A�j���[�g�����t�߂ŃJ�N�J�N���������ɂȂ�ӏ�������܂��B�@�M�A�������Ǝv���ĊJ���Ă݂Ă��Ȃ�Ƃ�����܂���B�@�ǂ����M�A�Ȃǂ̋@�B�I�Ȃ��Ƃ���Ȃ��炵���B���܂܂Řr�Ɏg���Ă����T�[�{�Ȃ��ǁA�ȑO���炱��Ȃ������̂��ȁH
�|�e���V�����[�^�ɏ��������̂�������܂���B�@�G�s�b�`�Ȃ̂œ���悪�����̂��K���ɁA�I�t�Z�b�g�����ē��������Ƃł������ȓ����̉ӏ����g��Ȃ��悤�ɂ��܂����B
�Ȃ�Ȃ̂��ȁH�C���ɏo�����璼��낤���B
���X���V����
��B�̃N�{�����A�N���t�g�}�������r���{�b�g�ʼnΐ����[�o�[�R���e�X�g�ɎQ�����ꂽ�炵���B
���Ƃ��ƃV�O�}����낤�Ǝv�����͕̂s���n���s��������̂��ړI�������̂ɁA���̃V�O�}�͕��n���������܂���B�@���̓����ɂ��������̂����ǁA�������Ă݂āu�ʔ����Ȃ��Ȃ��`�v���Ă̂����z�ŁA����܂莟�ւ̈ӗ~���킩�Ȃ�������ł��ˁB�@���ʁA���n����s������s�v���O���������g��ł܂���B�@������������\���������B
�ʔ����Ȃ�������F�X�ƍl���Ă݂��̂����ǁA���[�`���Z���Ƃ��납�Ȃ��ƁB�B�@���̍\���I�ɃN���̂悤�Ȍ`�Ԃɂ���Ƃw�|�x��Ԃł̎��R�x�͔�r�I�傫���̂����ǁAZ�����ɂ͂���Ȃɑ傫�����R�x�����Ȃ��B�@Z�����ւ̎��R�x���o�����Ƃ���ƁA���@���K�̂悤�ȕ��s�p���ɂȂ��āA�s���n����s����ɂ͕s����B�@�ڎw���Ƃ���͑���ɃZ���T�[�����Ď�T��Łi���T��H�j�u�̂悤�ȕs���n��������ƁB�@�Ȃ̂ŁA�w�|�x�|�y�̂��ׂĂ̎��R�x���K�v�ł��B
�Ƃ������ƂŁA�V�O�}�͂�����̕����ɉ����悤�ɍ\���ύX�����Ă������ƍl���Ă��܂��B
�@
���̓����_�B�@����ς���s����ł̃t�B�[�h�o�b�N����͂��܂��s������������܂���B�@�����Ă݂������Ƃ͂���������̂����ǁA�J���ʂ������Ă�����Ǝ������ꂻ���ɂ���܂���B
���̐�̎�������̂��Ƃ��l���Ă��A�����s���̂ĂĂł��A�t�B�[�h�o�b�N����ł̓��쐧��ɂ��čl����ׂ��Ȃ̂ł͂Ȃ��낤���ƍl���͂��߂܂����B
���炩�̗̓Z���T�[���K�v�ł��B
���X���X����
�߂�ǂ������Ȃ��`�@�Ǝv���C�������ە����サ�ăV�O�}�̍\���v�����܂��܂ƁB�@CAD�͑O��PC�ɓ������܂܂Ȃ̂ŗ����グ��̂ɂׂ�ڂ��Ɏ��Ԃ�������B
�ȉ��A�G���ȃ����B
ZMP�K�͕��s�̃t�B�[�h�o�b�N���䂪�ł��Ȃ��B�@�O���I�u�U�[�o�ɂ��Ē��ׂ�B
�ڒn�Ռ����z�������i���K�v�B
��������W�n�ōs���Ă��邪�A�A�N�`���G�[�^�͋ɍ��W�n�i�Ƃ������Ȃ����H�j
�@�@�_���p�[����ȂǂŎ����ɕ����������䂪�s���Ȃ��i�H�j
�ߊp�x����ZMP���v�Z���悤�Ƃ���ƁA�����ڒn�������ƂȂ�̂œ���B
ZMP�v�Z�͉����x�l���d�v�Ȃ��߁A�ߊp�x�f�[�^�Ɍ덷�E�m�C�Y������ƁA�܂Ƃ��Ȍv�Z���s���Ȃ��B
�@�˃m�C�Y���_�N�V�������K�v�B�����x�Ή����l����ƁA�i�J���}���t�B���^�[���j�ŏ����@�Ȃǂ��ǂ����i�H�j
��������Ŗ��[���W�̐��������ɂ��Ă��A�߃��x���ł̃t�B�[�h�o�b�N�͎������Ȃ������B�@���R�r�A���͓������ׂ����B
�̓Z���T�[�A�Ȃɂ��l����B�@�U���͊o�Z���T�[�ɂȂ�H�i�����ĉ��₷���̂ł�낵���Ȃ��j
���X���P�P����
�����͊֓��g���K��B�@�o�͖����̓��j���ɂȂ����̂ŁA�Q���ł������B
���������Ɩ��̊w�Z�̕����ՁB�@�o�����ɏo������Ƃ����̂ł�������Ă�����K��ɍs�����ƂɁB�@���炾��Ɖו����܂Ƃ߂Ă����̂����A�^�C���I�[�o�[�Ŏ�Ԃ�ŏo���B
�w�Z���������ɂ������������Ȗ{���ŁB
�Ȃ������ȁ[�A�ׁ[�����N�B�@���ł��t�@�~�R������Ă����B
����ɂ��Ă������͏����B�@�����������A������⋋�����K���ֈړ��B
�{���̗��K��͓����s�s��w���c�J�L�����p�X�B�@�����̂悤�ɂ܂�����Ɖ߂����Ă�����i�Ƃ����������͎�Ԃ炾�����邱�ƂȂ��j�A���{�ŃT�o�Q�����o�[�����������B�@��C�Ɋ��C�t���܂����B
�ŋ߂̗��K��͂Q����葽�������C�ł��B�@�Ԉړ��ŃV�O�}�����Ă���悩�������ȁ[�B
�ł��グ�͉w�߂��̏Ă���������ŁB�@����������Ȃ��Ă��܂܂����1000�~�肿�Ⴂ�܂����B�@���z�c��95�~�@SUICA�c��115�~�@(^_^;)
���X���P�Q����
�������{�b�g���l����Ƃ��A���̐�����Ă܂�͕������Ƃ��قƂ�ǂ�����v�Z���s�Ȃ�Ȃ�Ȃ�ŕ��������킯�ŁA����قǔY�ޕK�v���Ȃ��悤�Ɏv���B�܁A���ʂ̘b�ł��邪�B
���Ęr�̐�����ĉ�����Ⴂ���̂������ς�킩��Ȃ��B�@���̏ꍇ�A�r�͉����̃I�u�W�F�N�g����������x�����肷�邱�Ƃ��l����킯��������̂�������������̎��R�x���K�v�ɂȂ�B�@�����ŕ������l����Ɗ�{�͏璷���R�x��^���˂Ȃ�Ȃ��Ȃ邩��]�v�ɐ��䂪����Ȃ�B
�������{�b�g�ɐ^���Ɏ��g�ނɂ͓��͊w���Z������Ȃ�Ƃ��������v�Z�ł��鑫�A����Ȃ��Ęr�̐�����܂��߂ɍl���Ȃ���_���ł��ˁB
����
��������ŁA�ł��邾�������͂œ��삳����ɂ́H
�@�@�ˁ@�t�B�[�h�o�b�N�����������邵���Ȃ��H
�@�@�ˁ@�������ȓ���ł͂Ȃ��āA����ɂ͈Ӗ�������B�@��������𒊏o���ċ�������H
��������ƕ킢����͓����H�@�_���s���O����������H
���������Ȃ���A�u��������A�߂��Đ̂���Ă݂����Ƃ������ȁv�Ǝv���Ď����̃T�C�g�̃o�b�N�i���o�[�������ǂށB
�����ށB�@�ȂF�X���͓I�ɂ���Ă�ȁB�@������Ɣ��ȁB
���X���铮������Ă��Ďv�����̂́A�O�̃����_�̕����J�[�y�b�g���܂Ƃ��ɕ����Ă܂����B�@�����͍����̒Ⴓ�̂Ȃ���Ƃ��낾�����悤�ȋC�����܂��B
��������A����̗��K��Őΐ삳��ɂ����܂܂���ɂ��O�̃����_�̕����i�H�j�ɂ��ĕ�����܂����B�@�����ł��ˁB�@�������O�̃����_�A�D���ł��B���낻������@�̂͂�߂ăL�������������{�b�g��肽���ł��ˁB
�ł��A�v�悵�Ă�͎̂����p�̘r�Ƃ����Ƃ�������B�B�B(^_^;)�@�y�[�X�グ�Ȃ���B
���X���P�S����
���̐�ǂ̂悤�Ƀ��{�b�g�J����i�߂邩�B�@�������ƍl������X�������܂��B
�����Ă���̂́A�����_�E�}�[�L�����[�̋@�̂ł͂��̐�̑傫�Ȑi���͖]�߂����ɂȂ��ƌ������Ƃł��B
�ЂƂ̓����N�r�B�@�����N�r�͏㉺�����̓����ɂ͎��������ł����A�O������̓����ɂ͎����Ⴂ�B�O������̎����K�v�ł͂Ȃ����Ɗ����Ă��܂��B
�����N�r�ɂ����͍̂Đ����x�����߂邽�߂ł����B�@����Ȃ�̐��ʂ邱�Ƃ͂ł����̂ł����A�Đ����x�邽�߂ɍ��������߂�Ƃ�����i�́A���s�ł͔�����Ȃ��Ռ��ɑ��Ă͂��܂葊�����悭�Ȃ��悤�Ɏv���܂��B�@�Ȃ�炩�̏Ռ��z�����u���K�v�B
�����āA���͏d�v�ŁA���̂��߂̊߂̃����N�Ƃ����l�����͏d�v���Ǝv���Ă��܂��B�@�r�ɂ��Ă��r�ɂ��Ă��ߘA������Ƃ����͍̂�����K�v���Ǝv���Ă��܂��B
���̂��߂ɂ͐���n�̑��x�����ɂȂ�܂��B�@SEMB1200A��8�`�����l����UART�������Ă���FIFO�o�b�t�@�܂œƗ����Ă���̂ł����ǁA4000�ԂƒʐM����̂�115200bps�ŏ\���Ȃ��ǂ��ꂪ���E�B�@403X�̍����ʐM�ɂ͑Ή��ł��܂���B�@�iFPGA�Ɏ������ł���̂�������܂��B�j
�T�[�{���R���g���[�����V���ƂȂ�Əo��ł����Ȃ��B�@�R���g���[���͓K���Ȃ̂��Ȃ����B
���X���P�U����
���͍����͎����̒a�����ł��B
�����A�a�������Ă����ƃJ�E���g�_�E���C�x���g�݂����ŕ��G�Ȃ��ǁA����ς�u���߂łƂ��v���Č�����Ƃ��ꂵ���B
������������ʂɎd���ɏo�ĕ��ʂɉ߂����Ă������ǁA���i�͉��l���ŐH�ׂĂ郉���`�������Ɍ����Ĉ�l������B�@�a���������Ă̂Ɉ�l�Ń����`���Ă̂����т����Ȃ��A�@���Ďv�����̂ł��X�i���ă����`��H�ׂɍs���Ă��邨�X�ˁj�̓X������ɁA�u���͍����A���a�����ȂB�v�Ƃ������āA�u���߂łƂ��������܂����`(^.^)�@�v�@���Č����Ă��������B�@(^_^;)
�ߌ�ɂ͓����ɁA���O�����Ȃ�����a���������Ă̂ɒ��ш�l�ł��т����H������@�Ƃ��Ӗ��̂Ȃ��������������A�@���Ȃ����l�ʼnf��ςɍs������ł���@�ƁA�ςȑR�S�@�i�����Ɖ�������Ƃ����A�����Ȃ�̒a�����v���[���g�������炵���j�@�o���ꂽ��B
����̉ʂĂɂ͎c�Ǝ��Ԃ��炢�ɂȂ��āA�v���o�����悤�Ɂ@��Ђ̏��̎q����o�[�X�f�[�f�R�����͂�����B�@�i���̓������C������炵���j
���N�͒a������܂ŊJ���Ă��ꂽ�����̉c�Ɓi�����j���A�@��c���Ă���Ă̂Ɏ菵�����邩��ߊ���Ă����Ə����ȕ�݂����o���āA�u����A�ێR����ɓn���Ă��������B�v���Ď�n����邵�B�@�����A�������v���[���g�������Ǝv���܂�����B�@��T�́A�u���T�͒a�����ł��ˁ[�v���Č����Ă������ɁB
�₵���₵��(^_^;)�@�a�����ł����B
�@
���āA���������B�B�B
���X���P�W����
�ߑO���A�߂��v���O�����B�@�t�B�[�h�o�b�N���[�v���ł��邾���������������Ƃ������ƂŁA���i��20ms�����̂Ƃ����4ms�ɒZ�k�B�@UART1�{������ɃT�[�{4�Ȃ��ł����̂����A�T�[�{1�Ɍ���B
�t�^�o��RS601CR���ƃv���e���V���������ăg���N�𗎂Ƃ��Ă����A�d������Ă���Ƃ��ƕς��Ȃ����炢�̌y���߂��ł��܂����B�@KRS���ƁA�A�g���N����������Ȃ��ȁB�@�܂��y�����ǁA�A�@���ނށA�g�����Ȃ������Ȋ����B
�X�g���b�`�ƃX�s�[�h���Œ�܂ŗ��Ƃ��Ă��A�ߊp�x����荞�ޑ��x�͑卷�Ȃ��悤�ŁA�߂̔������x�͕ς��Ȃ��悤�ł��B
�ߌォ��H�t���֔������ɁB
�ŋ߂͗��K����ɍs���r���ŕK�v�Ȃ��̂������Ɋ����x�������̂ŁA���������H�t���͋v���Ԃ�B�@���������ă��{�b�g�Z���^�[�ɍs������I�T���N�������Ȃ����ȁ`�B�@�Ǝv���ė������ƁA�@�r���S�[(^^��@
PIC���g�������[�^�[�������肽�����Ă����̂ŏH���Ɛ�ɕ��i���ɁB�@���C�^�[�͂����ɂ���̂�݂��o�����ƂɂȂ�܂����B�@�ł��A����̂��ƍl�����PICKIT�����Ă��悩���������ˁB�@���܂��s�����獡�x�̋@��ɂł��B
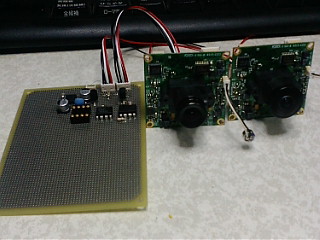
�H�t���ɍs�����ړI�́A�Ԃ�Ԃ炵���������̂����ʂ����ǁA���łƌ������ች�����X�e���I�O���t����邽�߂̃{�[�h�J�����w���B�@�O������������2�摜��1�摜�Ɉ��k�������Ȃ̂ŁA�O�������M������������̂łȂ��Ƃ����Ȃ��B�@�����{�[�h�J��������3000�~���炢���炠��̂ɁA�O�������M�����g��������15000�~�B�@���ꂪ2�����ˁB�@�B�B�ł������B
�������������ĂĂ��d���Ȃ��B�@UVC��2�̃J�������Ȃ�����CPU���ׂ������������낤�Ǝv���āA�@����ARPU-100 �ŃX�e���I�O���t�������ɂ͂��ꂵ�����@���Ȃ��i�Ǝv���j
�r�̐���Ń��m�ɃA�N�Z�X����ɂ͂ǂ����Ă����s����K�v�Ȃ�ŁA����ɓ˂����������Ǝv���Ă܂��B
������m�F�B�@�I�b�P�[�ł��I

���O�̃����_�Ɏg���Ă��t�B�b�V���A�C�����Y�����ꂽ�B�����Y�}�E���g�̂˂��s�b�`�����ł����B

�t�B�b�V���A�C�����Y�A�T�o�Q�̃��{�ɂ炢����ˁB�@���E�L�����āB�@�ł��A�}�E���g������Ȃ��ȁB�c�O�B
���X���P�X����
�����_�E�}�[�L�����[�̘r���g���āA�߂̌���
 �@
�@ �@
�@
�܁A�S�R���܂��s���ĂȂ���ł����ǂˁB�@�ߘA�������g�ݍ���ŊO�͂������ē������y���ށB�@�ړI�Ƃ͑S�R�Ⴄ���Ǔ����͖ʔ����ł��B
�����́APIC���C�^�[�����ɃI�T�����V�тɗ��Ă��܂����B�@����m�F�̂��肪�A�A�Z���u���Ə������݂܂ł��������āA���ʂ�邱�ƂȂ��Ȃ��Ă��܂������ǁA�܂�������ˁB�@������@��PIC�̕����Ă��������B
�I�T������ɐ����āA�V�O�}�����Ă݂�B�@�I�T���n�n��
�u���o�Ă��Ă郍�{�b�g�Ƒ��F�Ȃ��d�オ�肶��Ȃ��ł����I���ЃT�o�Q�ɎQ�킵�Ă���������v
���āA���Ȃ��͂������Îґ��ɁI�H�@(^_^;)
�l�ɂ͕�����Ȃ��s���������ł���B�@�����i�������Ă܂���ł���������Ƒ҂��Ă��������ˁA�n�n�a�B�@�i�A�~�G�a��낵�����j
�@
�X�e�B�t�l�X(stiffness)���ĒP�ꂪ�����āA�����Ƃ��d����\���܂��B�@�ߐ���ł��߂̃X�e�B�t�l�X������Ă̂�����܂��B�@�߂̌������A�N�`���G�[�^�i�ؓ��j�Ő��䂷�邱�Ƃł��B�@�@����P��ɃR���v���C�A���X(compliance)���Ă̂������āA�����₷���Ƃ����Ƃ����Ċ����ɖ悢���ȂƎv���̂ł����A�@���̃R���v���C�A���X���ĕ��삪�ς��Ɓu�@�ߏ���v�Ɩ��B
�R���v���C�A���X���ĒP��́A�ŏ��T�[�{�̐���p�����[�^�̂łǂꂾ���ڕW�p�x���炸��Ă��ǂ������Ă����p�����[�^���������̂Łu�������v���ăC���[�W�ŔF�����Ă����̂ŁA���̌�Ɏd���ŏo�Ă����R���v���C�A���X�ɂ͂��̂�������a��������܂����B
�ł��A�@�ߏ�����Ă̂́u�@�߂���遁�����v���ĈӖ�����Ȃ��āu�@�߂ɉ����Ċ�������v���ĈӖ��Ȃ�ł��ˁB�܂�A�u�i�@�߂Ɂj�]���ē����v�Ƃ������ƂŎ��Ɠ����j���A���X�ƁB�@���t���Đ[���ł��ˁ[�B�@�i���A�݂�Ȓm���Ă��H�@����܂���ł��@(^^�U�@�j
�@
���̃X�e�B�t�l�X�ƃR���v���C�A���X���ǂ̂悤�Ɉ������B�@�V�r���ڒn����Ƃ��͏Ռ����z�����邽�߂ɃR���v���C�A���X���A�������A���̏u�Ԃɂ͎x���r�ɂȂ��Ă���킯�ŃX�e�B�t�l�X���K�v�ɂȂ�B
�����āA����͐������������łȂ��A�i�s�����ɂ��K�v�ł��B�@�����Ǝ��̐�ւ������܂����ł��B
�@
�����V�^�J����\���B�@�ǂ�Ȃ̍��̂��y���݂��ȁ[�B�@�s���n���s�ł���ˁB�@����������Ƃ����N���A���Ď��̃X�e�[�W�ɍs�������ł��B�@�ł����A�����_�͂܂����n��Ώۂɂ���Ă������Ƃɂ��܂��B�@���s�ɑ���t�B�[�h�o�b�N�̂��������ɂ��Ă���������Ɩڐ����L���čl�������Ǝv���Ă܂��B
���X���Q�O����
�����́u�u���b�N���X�^�[�v�̎��ʉ�̓��B�@����ł���ߌ�1���̉�ŊςĂ��܂����B
�n�C�r�W�������悪�B�����t�f�W�J���ŎB�e�����Ƃ��B�@�f�������y�ɎB���悤�ɂȂ������̂��B�@�f��̏o���͂Ƃ����ƁA���ւ˂���D������Ȃ���́A��r�I������₷���b�ł����B
���䈥�A�̃��{�����̃��`���Ԃ�ȊO�͊T�ˍD��ہB
�����ɗՂނ��܂܂���̐��_��Ԃ��I�m�ɕ`�ʂ���Ă܂����B�@���ƁA���y�����f���ɂȂ��Ă�炵�����{�X�|�̋q���o�Ă��܂����ǁA���y����͂����ƈ��z�����ł���ˁB(^.^)
��f��A���r�[�ŃL�m�s�[����\��B�@�L�m�s�[�̓A�N�e�B�u���ȁ[�B
���̌�A�H�t���֍s���ĕ��i�w���B�@����A�Ƃ̕��i�q�ɂ��`�F�b�N���āA�X�e���I�O���t�����邽�߂̕s�����i���Ă����B�@�O�A�x�̂���������H�t���Ƃ͎����Ƃ��Ă͒������B�@������A�O�A�x�Ƃ��x�߂���ɎO���Ƃ����{�b�g�O���B�@�������A�J���͂����ς�i��ł��܂��B
�V�����_�̑��\������̌��܂��Ă����̂ł��낻��\���v�ɓ���܂��B�@���ꂩ��͏璷���R�x�ɂ��Ă̌����i����A�����j���K�v�ɂȂ肻���ł��B�@����̎�i�������ł���ˁB�@�璷���āB
���X���Q�P����
�ӂӂƐV�^�����_�ɂ��čl���Ă��āA�ӂƌ��t���v�����B�@�Ȃ�ƂȂ��C���[�W�������Ă������Ƃ����t�ɂȂ�Ɠr�[�ɋ������悤�ȋC�����܂��B�@�v���������t���������������ꂩ�猟�����܂��B�@�Ƃ������肪�o�����悤�ł��ꂵ���B
�@
�ƂɋA��ƁA�������Ă����V�O�}�����p�[�c���A�~�G����͂��Ă����B
�J����ƁA�A

�ێR�����������`�@(>_<)
�@

�ێR����A�������a�����������݂����ł��B(-_-;)
�@
�����_�̗��ډ���i�߂�͂����������A�V�O�}�̉��ǂɍ�Ɛ�ւ��B
���������ꂽ�V�O�}�B�@�܂������Ȃ��ł����B

�����炭�́A�T�o�Q�I�ɂ͎キ�Ȃ����̂ł͂Ȃ�����(^_^;)�@�����������邩�ǂ����̓v���O��������ł��B
���X���Q�R����
�����_�̗��ډ��𐄐i�B
�ߌォ���܂ł͂t���B�@���j�o�[�T����ʼn�H�g�ނ̂��Ď��Ԃ�����B�@�ł��A��N�����Ĕ���������͎��Ԃ�����������Ȃ����ǁB
�C���t���ƁAIC�͑S��DIP�����������R��R���f���T��IMD���i�ł��悩�����ȁB�@�R�l�N�^���n�[�t�ŏ������܂Ƃ܂������Ă̂��B��̗��_���B(^_^;)
ODD/EVEN�������A�r�f�I�X�C�b�`��H�������Ɠ����Ă���炵���B�@���Ƃ͓�̃J���������ē��������߂̓����M������邾���B
�����PIC�ō����ǁA�A�Z���u�����ȁ[�B�@���̂��̂������v���Ԃ�̃A�Z���u���ł��B
���X���Q�U����
����̘b�B
PIC��VD�M�������܂��B�@PIC��12F675�B�@����˂���̉�H�}�ł�������g���Ă�B�@����̂����ADC�͗v��Ȃ����Ǘ��ʂ��Ă��邹�����A�\���Ɉ����̂ł�����̗p�����̂��ȁB�@�����ɂ������̂��߂ɔ������̂��Ƃɂ���܂����̂ł�����g���܂��B�@�v���O������LED�_�ŗp�̃v���O�������l�b�g�ɂ����ς��]�����Ă���̂ł�����C������ΊȒP�ɂł��܂����B�@�A�Z���u���͂��܂��Ȃ��������Ă�[�킩���B
VD�M����60Hz�̐M���Ȃ��ǁA�f���[�e�B�[�䂪���̂������ł����i����A�����������ȁH�j�@1����16.7ms�ɑ��ăp���X����200�ʂ��قǁB�@�N���b�N�́A�SMH������������Ă��邯�ǁA16MHz�̃��]�l�[�^�������B�@���������˂���̉�H���̂܂܁B�@�������x���K�v�Ȃ낤�ȂƁB
�Ƃ��낪�A���̃��]�l�[�^�����U���Ȃ��I�H�@����Ȃ��Ƃ���̂��H�@�ƒ��ׂĂ݂��畉�חe�ʂ������ł͔��U���Ȃ��ꍇ������Ƃ��B�@���i�����˂��˂Ǝw�ł������Ă���Ƃ��܁[�ɔ��U���n�߂��肷��B�@�s�v�c�Ȃ̂�4MHz���炢�̃N���b�N�œ���������Ă��邱�ƁB�@�����N���b�N�������Ă��Ȃ��ă��]�l�[�^���SMH���Ŕ��U��������Ă�̂��ȁH
�����ƂȂ���낤���ǁA���Ԃ����������Ȃ������̂œ���4MHz�Ői�߂邱�ƂɁB�@���ꂩ��u�ł���̂��v���ς邽�߂ɏH�t���s������Ȃ̂ł��̂Ƃ��ɐ������U�q���I�V���[�^���Ă��悤�B�@�Ȃɂ��f���[�e�B�[�䂪���������Ă����������B
�I�V���ŐM�������āANTSC��PC�ɃL���v�`���[���j�^�[���ĊςĂ��Ȃ����Ă���悤�ȓ����Ă��Ȃ��悤�ȁB�B�B
������Ǝv����PC�̃f�B�X�v���C�̃R���|�W�b�g���͂ɂȂ��ŕ\�������Ă݂�ƁB

�����Ƃł��Ă��B(^^��
����͊�̑������ɃJ�����P�摜�A�����̑������ɃJ�����Q�摜�����ĂP�̃t���[����2�摜�����Ă܂��B�@�RD�e���r�̏ꍇ�͑������̖{�����{�ɂȂ��Ă�̂����ǁA����͖{�����̂܂܂Ȃ̂ŁA���Ƃ��Ă͐��������ɔ����̏��ʂɊԈ����Ă��邱�ƂɂȂ�܂��B
�Ƃ��낪�A����Ă�r���ɋC�Â����̂����ARPU-100�̃L���v�`���[����320�h�b�g�~240�h�b�g����ł����B�@�܂萂������\�͂��ł�NTSC�̔����ɊԈ�����Ă�B�@���Ă��Ƃ͂����������d�������̂ɂ����炭�Б��̃J�������͂��ׂĊԈ�����Ă��܂��Ǝv����B
���傤���Ȃ��B�@�ł�1�t���[����2��ʂł͂Ȃ��A1�t���[��������2��ʂ��ւ���悤�ɂ��邵���Ȃ����B�@���ꂾ�Ƃǂ���̉�ʃf�[�^�Ȃ̂��̋�ʂ����Ȃ����Ė�肪�����ł��ˁB�@���ƁA���ܗ����Ȃ��łP�TFPS�ɂ����Ȃ�Ȃ����ƁB�@����͂��Ƃōl���邱�ƂƂ��āA�܂���EVEN/ODD�M�������ăt���[������H��L��H��L�ƂȂ�M�������܂��BSOP�̃t���b�v�t���b�v���茳�ɂȂ��̂ŏH�t���ŁA�A�A�@���[�[�[��@orz�@�@�����Y�ꂽ�̂ɍ��C�Â����B�B�@���������H�t���܂ōs�����̂ɁB�B�@DIP�Ȃ炠�������Ȃ��B
�@
�\���啝�ɒx��ďH�t���Ɍ������܂����B�@�ڎw���͏H���o�R���{�X�|�b�g�B�@�Ȃ��̓X���ɘf�킳����������I��点�i���͏I����ĂȂ��������ǁj���{�X�|�b�g�Ɍ������܂����B
���{�X�|�b�g�ɓ���ƈ��Ԃ���Ɂu���܁A���C�����I������Ƃ��ł��i�ɂ����j�v�@�����[�A�Ԃɍ���Ȃ��������B�@�C�x���g��̗]�C�ƌ�Еt�����y����ł��܂����B
�O�X���獐�m�̂������u�ł���̂����X�g�o���h�v�@�����t�́u�����Ă܂��v
���䗠����r�X�R���菵������̂ōs���Ă݂�ƁA�u��������Ɂw�����Ă܂��I�x���đ吺�Ō����Ă��������i�ɂ����j�v�@���₢��A����`�����ł��Ȃ��������A�I����Ă��痈�ăO�b�Y�������炦�Ȃ��ł���B
���̌���O�R���A����Ȃ��Ă��܂܂��u��������ɕ������Č�����ł���I�v�Ƃ��A�_��搶�܂ňꏏ�ɂȂ��Đ���܂��B(�[�[;)
�Ȃ�ƂȂ���̊��Ҋ�������Ă��Ă��܂����̂ŁA�u��������I�@�����Ă܂��I�v�@������n�O���Ă��܂����B

��ŕ����ƕ������Ȃ��Ă��ǂ������Ƃ��B�@�u���܂���̂����Ńn�[�h���オ�����������ł��B�v�@���āA�A�I������ˁ[�I
�@
�ł��グ�ł́A�u���b�N���������̘b�Ƃ��u���b�N���Q�C�ɂ��Ă������Ęb�Ƃ��A�u���b�N���_�Șb�Ƃ��Ő���オ��܂����B
���ƁA�g�R�g�R�ۂ����b�B�@���x�⑬�x����̑O�Ɏp������ł���ˁB�@�x��ʂ��傫������Ȃ̂łǂ����Ⴂ���̂�������܂��A�g���C���Ă݂����l�^�ł��B
���X���Q�U���̂Q����
�����̘b�B
�ꉞ�A�m�F�̂��߁A�t���[�����d�̏�Ԃ�PRU-100�ƂȂ��ł݂܂����B�@���ʂ́~�B�@�Б��̉摜�����擾�ł��Ȃ���ɉ摜�擾�Ɏ��s���܂���B�@PC�̃L���v�`���[�Ɠ�����Ԃł��B
�Ƃɕ��i���������̂ŁAeven/odd�M�������ăt���[������ւ��M�������܂����B

�摜�Ō���ƍ����1�t���[���ɑ��d�摜�ƕς��܂��ǁA���ۂɂ̓t���[�����ɐ�ւ���Ă���̂Ńr�J�r�J���܂��B�f�B�X�v���C�����݂���(^_^;)
�v�f�ʂ�ɓ����Ă���݂��������ǁARPU-100�ɂȂ��ƁuSegmentation fault�v�Əo�āA�v���O�������I�����Ă��܂��܂��B�Ȃɂ����C�ɓ���Ȃ��炵���B�@�v�������1�t���[�����d���ł��uSegmentation fault�v�͂ڂ��ڂ��Əo�Ă����̂ō���̍\���ł��C�ɓ���Ȃ����Ƃ͂������炵���B
�����VD�M���̐��x���ȁH�@�����Ɛ��m��29.97fps�ɂ��Ȃ���Ȃ�Ȃ��̂��H�@�L���v�`���[LSI�̂��Ƃ�����������ƒ��ׂ����������̂����B
���X���Q�V����
������Ƃł����m��VD�M�����o�����߂ɁAPIC�̃N���b�N���O�t���̐������U��ɂ��܂����A20MHz�B
�N���b�N�v�Z���āA�M���̐��x���グ�ăg���C�B�@���ʂ́`�A������̓}�V�����ǂ܂��_���ł��B
�F�X�Ǝ������Ƃ���A�̐S�̉�ʐ�ւ�����߂�ƊO��DV�M���ł̉摜�M���͖��Ȃ��L���v�`���[�ł��Ă���悤�ŁA���̓J������ւ��ɂ��M���̂Ȃ�炩�̕s��̂悤�ł��B
�F�X���˂���܂킵�Ă���Ƃ��܁[�ɃJ������ւ����Ă��Ă��L���v�`���ł��邱�Ƃ�����̂ł����A�J�������ς�ς�Ɛ�ւ�邱�Ƃ͂Ȃ��A�ǂ��炩�̃J�����f�����L���v�`���[����Ă��܂��B
������A�A�ǂ������܂��Ȃ��Ȃ��B�@���ׂ�ƁAODD/EVEN�M���̐�ւ��̓t�B�[���h�̐擪�ɂ��铙���p���X�̒���ɂȂ��Ă���B�L���v�`���[LSI���^�C�~���O����邽�߂ɂ�����g���Ă���Ƃ���Ύ��s���铹���ƂȂ�̂��H�@
���P�O���Q����
�i�d���Łj�������Ƃ��L���Ĉ��݂ɁB
�������Ƃ��Ďv���Ă�͎̂��������炵�����āA�t���{�b�R�ɂ����B�@����̉ʂĂɁu�V�}�P���͂��ĂȂ��v���u������_���Ȃv�A���_����Ɓu�ق�A���ꂻ��i�j�v
���݂ɍs����Ȃ������B
�@
�ƂɋA���Ă��������Ƃ͂Ȃ����āA�@�����_�̗��ډ��͑��ς�炸�B�@��ʃX�C�b�`�̃^�C�~���O�����Ȃ̂�������Ȃ��Ǝv���A���t�B�[���h�Ƒ��t�B�[���h�̊ԂŐ�ւ���悤�ɂ��Ă݂����Ȃ�ɂ��ς��Ȃ��B�@�i���܂܂ł�EVEN��ODD�Ő�ւ��Ă����̂�ODD��EVEN�Ő�ւ���悤�ɂ����j
���܁[�[�[�[�ɐ������邪�A�t�B�[���h�̓Y���Ă��邵�A�Б��̃J�������炵���L���v�`���[���Ȃ��B�Ȃ����ӂ����肾�ȁ[�B�@
RPU-100�́AOS���h���C�o�[���o�C�i���[�����Ń\�[�X�͌��J����Ă��܂���B�@�Ȃ̂ŃL���v�`���[LSI�ł���SAA7113�̓��������ׂ��Ȃ����A�ύX�ł��Ȃ��B�R���t�B�O�ݒ�ł���悤�ɂ��Ƃ��ė~���������ł��B
�ȒP�ɗ��ډ����悤�Ǝv���Ă����i�߂ė������A����ȏ�i�߂�͓̂���Ȃ����ȁ[�Ǝv���͂��߂܂����B
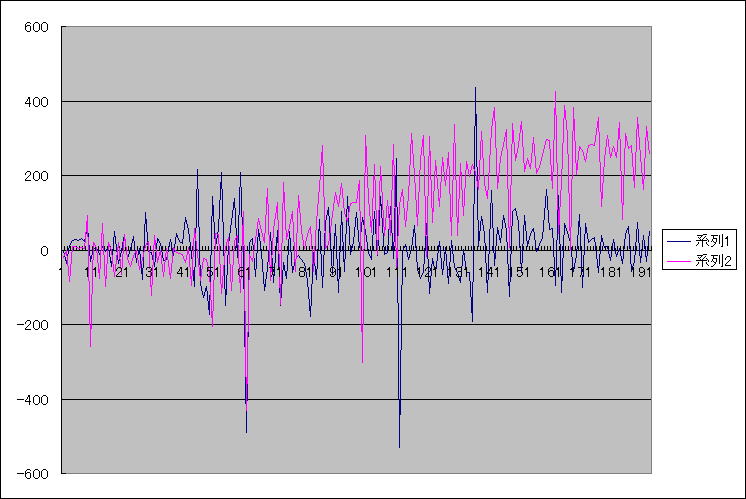
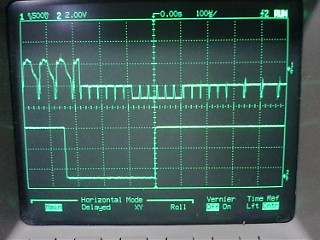
����[�t���[�Y�ɂ��悤���ȂƎv�������A���������A�A�@�Ǝv����VD�M���ɂ��Ă�����x���ׂĂ݂܂����B�@�̒��ׂ�����MSM5258�Ƃ����ȈՓ����M������LSI�̃V�O�i���^�C�~���O���Q�l�ɐM��������Ă������A�����ƌ������Ă����ƐF�X�Ⴄ�����o�Ă����B
�p���X����191.07us��������27us��������A�}�C�i�X�d���̂��̂�����ATTL������A�X�ɂ͐��_���̂����_���̂�����A�������䑕�u�ɂ���Ă͐�ւ�������̂��������肵�܂����B�@����g���Ă���J�������ǂ��VD�M�������҂��Ă���̂�������Ȃ��̂Ń^�C�~���O��ύX���Ă݂�̂��悢�����m��Ȃ��B
�����AVD�哱�œ������Ă���̂Ńp���X�����e�����Ȃ�����͖��Ȃ��͂��Ȃ�ł����ǂˁB�@�܂���Ҕ��B
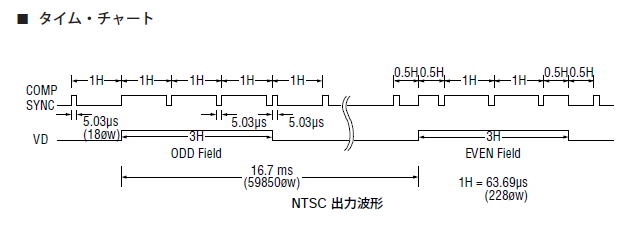 MSM5258�̃^�C���`���[�g
MSM5258�̃^�C���`���[�g
���P�O���Q�����̂Q��
��������ANTSC�̔g�`�����ĂȂ��ȁB�t���[������ւ��Ƃ�������Ă������B�@�Ǝv���ăI�V���Ŋώ@���Ă݂��Ƃ���A�ǂ��ɂ�VD�M���Ɠ������������ɂȂ��Ă��Ȃ��B�F�X�ƒ��ׂ��Ƃ���A��̃J�����̂����ЂƂ�VD�M���ł̓�����������Ă��Ȃ����Ƃ��킩�����B
�������ȁ[�A���̉�ꂽ�����瓯���M�������o���Ă����Е��̃J�����ɓ���邩�ȁ[�A�Ƃ��l���Ă����̂����A�@�����̓J�������Ă��傤��2�T�ԁB�@�H���̏����s�nj������Ԃ�2�T�ԁA�@�����Ȃ�����ł���[���Ă̂ɋC�Â��ċ}篏H�t���܂ōs���ė��܂����B
�u�ӂ��̂����̂ЂƂ��O���M���������Ȃ��āA�A�A�v�@�Ǝ�������������A�������܁u�Ȃ�قǁA��Ŕ�ׂĈႤ����Ȃ�ł��ˁB�@�킩��܂����ǂ��������܂���B�v�@�ƁA�w�����������ꂸ�A�̎����������������Ɍ������Ă���܂����B
�����ς��̏�i����̂��ȁB�@�A���ē�����m�F�����Ƃ��듯�����삵�Ă���܂����B�@�悩�����B
�A�����̂��x�������̂ł���ȏ�͖����Ɏ����z���B�@�Ȃ��Ȃ��V�O�}�Ɏ肪���Ȃ��Ȃ��B
���P�O���R����
�J�����͓�Ƃ�����ɊO�������M���Ɠ�������悤�ɂ͂Ȃ����̂ł����A���Ԃ͈���ɐi�����܂���B
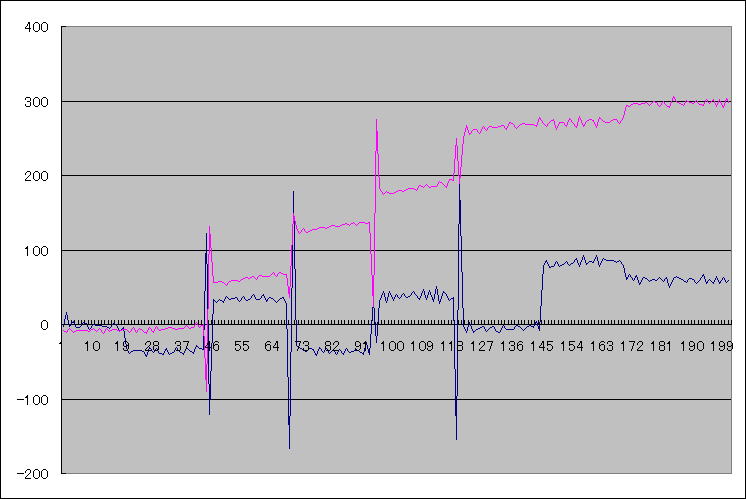
�I�V���ŐM���߂Ă���ƁA�ǂ����VD�M���͕��_���������̂悤�ŁA������œ��삵�Ă���悤�Ɍ����܂��BVD�M���������̐���������1�{���̎��Ԍ�Ƀt���[�����J�n�����悤�ł��B
�悭�悭���߂Ă���ƁA�J�����P�ƃJ�����Q�Ńt���[���̊J�n�^�C�~���O���Ⴄ���ƂɋC�Â��܂����B�����ōl���Ă݂�ƁAVD�M���͊�t���[���Ƌ����t���[���ł̍����Ȃ��킯�ŁA�J�����P�ƃJ�����Q������������Ă���ꍇ�����肦�邱�ƂɋC�Â��܂����B�J�n�^�C�~���O���Ⴄ�悤�Ɍ������̂͊�t���[���Ƌ����t���[���Ő��������M���̈ʑ���������������Ă��邽�߂��ƍl�����܂��B
�����ŁA�J����1�ƃJ����2�̓d���������ɓ���悤�ɋC�����āADV�M���Ƃ̓����̗l�q���m�F���A�t���[���̃Y�����Ȃ����Ƃ��m�F���Ă���L���v�`���[�ɐڑ������Ƃ���A�A�A�@�r���S�[�I�I�@����ɃL���v�`���[�ł��܂����B
���܂��s�������Ȋ����ɂȂ��Ă����̂ł�����x�t���[�����d������m�F���Ȃ����B�@���ǁA��t���[�������L���v�`���[���Ă��Ȃ��i�f�[�^�����Ă��Ȃ��j�悤�ŁA�t���[�����d���͂ł������ɂȂ����Ƃ�������܂����B
�J������ւ���30Hz�ɂ��A�A�����ĂQ��L���v�`���[����J�����P�ƃJ�����Q�̉摜���擾�ł������Ȋ����ł��B�@���̓J�����P��2�̃f�[�^�̋�ʂ����Ȃ����Ƃł��B
���Ȃ݂�VD�����M����30Hz�ɂ��Ă݂��Ƃ���A�����M���ƔF�߂Ă��炦���A���������M���œ����܂����B�@�i�����������炱���EVEN/ODD���������邩�Ǝv�����j
 �@�@
�@�@
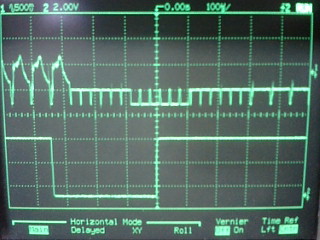
���オ�r�f�I�M���A����VD�M���B�@������|�C���g�ł̃r�f�I�M���̃^�C�~���O���Ⴂ�܂��B�@���ꂪ���݂��Ă��܂��ƃL���v�`���[LSI�̓p�j�b�N���N�����B
���āA������Ƃ����ڏ�����������V�O�}�Ɉڂ낤���ȁB
���P�O���P�O����
����͗��K��������ǁA�@�V�O�}�̐i�����Ȃ��A�@�J���~���Ă���A�@���Ă��Ƃŗ��K��Q���͒f�O�B�@�v���O������i�߂邱�Ƃɂ��܂����B�@
������獡���ɂ����āA���nj^�V�O�}�����v���O����������Ă����̂����ǁA�f�o�b�O�����悭���邽�߂Ƀ����_�̃R�}���h���������ƃR�}���h���C���������ڐA���Ă���܂����B
Coron�ɂ̓��j�^�[�Ɋւ��郉�C�u�������Ȃ��āA��������R���\�[���ɕ\������̂��܂܂Ȃ�܂���B�@UART�̓]�����x���l�����Ȃ��ƁA�����\����������茇�����肵�܂��B�@����ł̓v���O�����J�������ɂ����Ďd���Ȃ��̂ő��M�p�̃o�b�t�@��������������A��M�Ɋւ��Ă͕�������͂ƃR�}���h�q�X�g���[�̎���������Ă܂����B
�}���Ή����Ă��ƂŁB�B
�Ƃ��낪������Ɖ��߂��B�B�B
���M�o�b�t�@�ɂ��ẮA�ꕶ�����M�̏ꍇ�ɑ��M���t���O�𗧂Ă�O�ɑ��M���I����Ă��܂��Ċ��荞�݂��������Ȃ��������Ő����ԁB�@�R�}���h���͂ɂ��Ă�strtok( )����g�ݍ����_�œ����Ȃ��Ȃ邱�Ƃ�˂��~�߂�̂ɔ����Ԃ��܂����B
���Ƃ̓R�}���h�q�X�g���[�̈ڐA�ƃf�o�b�O�B�@����Ƃ������������܂����B�@�����ƁAatof( )���g���Ȃ����Ƃ�������܂����B�@�Ȃ�Ȃ�ˁB����@(�[�[;)
�����Ė{�_�̉��nj^�V�O�}�̋t�L�l�v�Z�̌������Ă���܂������A�ǂ����v�Z�~�X������悤�ŁA���܂������Ă���܂���B
�����͎d�������A���̂܂ܑ��ړ��ŁA�Ηj���͑��o���B�@���j���͈��݉�ŁA�A�B�@�V�����̒��ŋt�L�l�Č����ȁ`�B
���P�O���P�Q����
�����͒�������Ŏd���������̂ŁA����̗[������ړ����Ă���܂����B�@�d���͑��߂ɏI������̂ő��߂ɖ߂��ăV�O�}�̃f�o�b�O�B�@�t�L�l�̌v�Z�~�X���������āA���nj^�V�O�}��������Ƃ������o���܂����B
����̕ύX�_�́A�r1�{�ɂ��A�R�ōςރT�[�{���S�ɂ��Ă��܂��B�@�܂�璷�\�����Ƃ��Ă��܂��B
�璷�ߍ\���̃��{�b�g�i�A�[���j�̌��p�͐F�X����̂ł����A����V�O�}�ł͉��͈͂̍L���Ɍ��p�����߂Ă��܂��B�璷�\���̏ꍇ�A����r����W�i�ꍇ�ɂ���Ă͎p�����j�������������ɂ��邽�߁A�ߊp�x�肷�邱�Ƃ��P���ł͂���܂���B�@���܂܂Ŏ�����������{�b�g�̊ߍ\���͏璷�ł͂Ȃ��������ߋt�L�l���ʼn�͓I�ɋ��߂邱�Ƃ��ł����̂ł����A����͏��������˂Ίߊp�x�����܂�܂���B
������Ƃ��낪����̉ۑ�ɂȂ�܂��B
�ǂ����A���̏璷�\���Ƃ����̂��d�v���Ȃ��Ǝv���Ă���̂ŁA���̕����͌����̉��l�A�����Ǝv���܂��B
����́A������W��ς����Ɋ߂�������B�@�}�j���A������ł����ǁB(^_^;)
���P�O���P�S����
�璷�ߔŃV�O�}�̕��s�ł��B�@���͈͂��L���Ȃ����̂ŁA����ɂ��˂��ˋ�͑������C������B�@�C�����悢�B�@���߃��{�b�g�������ď��߂āu���قفv�Ǝv�����C������B�@�܂��A��肽�����Ƃ̂P�����ł��Ă܂��B
���͈͂��L���Ȃ����̂ŁA�ȑO��������傫������悤�ɂȂ����͂��B�@�����ĂȂ����ǁB
���́A�U�{�̋r���A�ʑ������炵�ē������ē��삵�Ă��܂��B�@�������œ������āA����������i��������Ƃ����邪�j���s���Ƃ�������v���O���������������B�@��������r�n�ł̕��s���\�ɂȂ�͂��Ȃ̂��B�@�������Z���T�[�I�ȗv�f�͕K�v�Ȃ̂����B
���P�O���P�V����
�y�j���͏o�B�@�ł��A�҂����Ԃ������̂ʼnƂ���PC����������Ńv���O���~���O�Ȃ�����Ă���܂����B
���̐����Łi���Ă����̂͂�����Ɛ������ɂ����������̒��ł́u�����v�j�A���j���͐V�^���{�b�g�̉����g�\���v�B
���x�̃����_�́A�V�O�}�̉��ǂ̗���ƈꏏ�ŏ璷�ߍ\���ō���Ă݂悤�ƍl���Ă��܂��B�@�V�O�}�ł͉��͈͂��~�����č̗p�����璷�߂ł����A�����_�ł͉��͈͂̍L���ƁA�璷���𗘗p�������䂪�ł��Ȃ����ƍl���Ď����Ă݂邱�ƂɁB�@��̓I�ɂ́i�Ƃ����Ă��S�R��̓I����Ȃ����ǁj�A�����_�}�[�L�����[�ł͊ߍ��������߂邱�ƂŔ\���I�͍Đ����x�̌����ڎw�����̂ł����A����͎I�ȍĐ����x�̌���Ƃ����e�[�}�Ŏ������Ă݂����ƍl���Ă��܂��B�@�ׂ��ȕ��@�͌������B�@����A�����悤�ȋC�������ȁ[�B
�\���v���Ă��č��X�Ȃ���Ȃ�ł����A�G�߂��d�߂ɂ��Ă���\�����Ă��łɏ璷�ߍ\���ł��ˁB�@���ʂ͓�d�ɂȂ��Ă���T�[�{�ɓ����l�����邱�Ƃ������̂��낤����璷����Ȃ��Ȃ��Ă���̂�������܂��B
���P�O���Q�X����
�Ђ��т��̓����X�V�����A����قǏ������Ƃ�����킯����Ȃ��B
�v���Ƃ��날���Čg�т�DOCOMO����SoftBank�ɕύX�����B�@�܁A�A�C�t�H���ɂ����킯�����A�l�C�����邾�������ĂȂ��Ȃ��֗��ł��ˁA����B
���낢��ƃA�v�����_�E�����[�h���ĂāA�uRagdoll Blaster2�v�Ƃ����Q�[���ɂ��傢�n�}��@������A�N�V�����p�Y���Q�[���Ȃ��ǁA�Ȃ������ǂ��ł��B
�@
�V�^�����_�̍\���v���I����ĕ��i�������B�@����قǔ[���ł����\���Ƃ����킯�ł��Ȃ��̂����ǁA�Ƃ肠�����g�ݗ��Ăē������Ă݂ăA�����o�����ق����������ȂƎv���Đ���ɓ��ݐ�܂����B�@����̃����_�̓z���g�ɍl���čl���Đ��삵�������A�A�A�B
���i���ł���܂ł��炭�����邻���Ȃ̂ł��̊ԂɃV�O�}�̃v���O�����ł����悤���Ǝv���܂��B
�R���́u�ł���̂��I�v�Ȃ̂ŁA�܂��Ő��̏�ŃV�O�}��������ǂ��̂����ǂ����̂Ƃ��蒆�r���[�Ȃ܂܂Ȃ̂Ŏ����Ă����邩�ǂ����͕s���B
����LAN�J�����ς�Ŝp�j���������Ȃ��B�@���āA�X�^�b�t�Ƃ��ĎQ���������Ȃ̂Ń��{�b�g���������Ԃ͂Ȃ����B�B(^_^;)
���P�P���V����
�R���̍Փ��́u�ł���̂��I�V�v�̂���`���ő����ցB�@���ǃV�O�}�̃v���O�����͐i�W���Ȃ������̂����A���Ȃ������������v���O�����͓������܂܂Ȃ̂ł��̂܂����Ă������ƂɁB
�����̃����O����̕⏕����`���B�@�o�Ԃ�����Ƃ��Ȃ��Ƃ����Ă����d������Ȃ��̂ł��[���ƃ����O�e�ɋ��Ȃ���Ȃ�Ȃ��킯������V�O�}�������ԂȂ�ĂȂ������ˁB
����ł����n�i��������H�j�Ɩ{�ԁi��������H�j�̊Ԃɏ������Ԃ�����̂œ������Ă݂悤�Ƃ����̂����A�A�A�@���܂������Ȃ����`�I�I�@�����ō�����v���O�����Ȃ̂Ɏg������������Ȃ��H�H�H�@���������ȁ`����ł����͂��Ȃ̂ɁA�Ƃ����R�}���h�����Ă��v���ʂ�ɓ����Ȃ��B�@�\�[�X�R�[�h�͎����čs���ĂȂ������̂Ŋm���߂邱�Ƃ��ł����ɁA���������Ƃ͂ł��܂���ł����B�@�ӂ�����Ղ�͏����Ȏq������t����̂ŃV�O�}�͌��\�l�C���o���ł���ˁB�y�̏�ł������邵�B�@���ꂪ�������������ǂȁ[�B
���ǂ������������̂́A�T�[�{�ɐݒ肵��������E�p�x���ԈႦ�Ă����T�[�{���������Ƃ������Ƃł����B������������v���O�����̎g�����ԈႦ�ĂȂ��Ă悩�����[�B�@�����A���n�ł���ɋC�Â��ĂĂ��ݒ肷�邽�߂̃c�[���������Ă����ĂȂ������̂łǂ���ɂ��Ă����������Ƃ͂ł��܂���ł����B
���̌�A�d���A��ɂ��傱���傱�ƍ�Ƃ�i�߂āA�������̓V�O�}�̃v���O�����͐i�߂Ă��܂��B�P�P���Q�O�A�Q�P����MAKE TOKYO�ɂ̓��{�ŃT�o�Q���o�W������Č������ƂȂ̂ł���Ɍ����ăV�O�}�i�T�o�Q�d�l�j���d�グ�čs���˂B�@�Ǝv���Ă���Ƃ���A�V�^�����_�̕��i���͂��Ă��܂����B�@���[�A���������g�ݗ��Ă����Ȃ�(^_^;)�@���܂����Ȃ��B
���P�P���P�S����
�����͂P�N�Ԃ�̃}�W�X�p�̉�B�@���ρ����@�Ƃ��āA���R��ځB�@����H�ׂ����͐h���̒�����|����������Ă悩�����Ȃ��Ǝv�����A�炢�̂���Ȃ̂ş��ςɁB�@�ȂA���ʂɂ������������ł��B�@���ł��悩���������B
�u���b�N����͏��߂Ă̎Q���Ȃ̂Ɂu�V��v�ŃX�^�[�g�B�@�ǂ��Ȃ邩���҂����̂Ƀy�����ƕ��炰�Ă��܂����B�@�I���V���N�i�C(^_^;)�@�u���b�N����Ė��O�ɒp���Ȃ��u���b�N�z�[���ݑ܂��Ղ�ł����B

���T�́uMake Tokyo 6�v�ŁA���{�ŃT�o�Q���o�W����\��B�@�V�O�}���d���܂Ȃ���Ȃ�Ȃ��B�@���T�̓E�B�[�N�f�[�ɂł��邾�������A���ăv���O������i�߂Ă���܂����B�@��q���Ă����R���g���[���̃f�R�[�_�������Ȃ�Ƃ��[���ł���R�[�f�B���O���ł����̂ŁA������g���ē�������悤�ɂ��Ă���܂����B
�p���ύX���L�[�{�[�h����}�j���A���ł����ł��Ȃ��̂ŁA�R���g���[���łł���悤�ɂ��悤�Ƃ����̂��^�̐s���B�@�Ȃ��m��Ȃ����ǂ͂܂��Ă��܂��āA�ߊǗ��p�̍\���̃f�[�^�����Ă��܂��B�@�ŏ��A�T�[�{���Ԃ���ꂽ�̂��Ǝv�����̂����悭���ׂ�ƃo�O�ł����B
�����o���Ƃ��ł���͍̂������Ō�B�@�v���O�����̃o�O�͋C�ɂȂ邯�ǁA�܂��͒e�q�̑��q����B�@�ȂA����50�����炢�����d���߂Ȃ��̂Řb���ɂȂ�Ȃ��B�ǂꂭ�炢�̑傫���ɂ��������������Ȃ������̂œK���ȃT�C�Y�̃^�b�p��2��ނقǔ����Ă��Ē��ׂ�ƁA�����i�����Ă���2��ނ̂����̏����ȕ��j��1000�����炢����B�@
�������ɂ��ꂭ�炢����Ώ\�����낤���Ă��ƂŁA�e�q�Ƃ��Ď��t���܂����B�@����ɂ��Ă����������`(^_^;)�@����ɂ��̏�ɔ�e�Z���T�[���t���̂��B

���̌�A���q�o���[�̉��������Ȃ���f�o�b�O�B�@�Ȃ�ƂȂ��n�}�肻���ȃp�^�[���������̂ŐS�z���������ǎv���̂ق����₩�Ƀo�O�͏C���ł��܂����B
�����ЂƂA�d��������Ə���ɃT�[�{�g���NON�R�}���h�����s����Ă��܂����Ă����o�O�������ł����A����͖����ɂ킩���̂����A���܂���Q�Ȃ��̂Ō�B
�c�������e�Z���T�[�g�������͂������A�v���O�����͍Œ���Ȃ�Ƃ��Ȃ肻���B�@���T��5���̂����A3�������݉�\�肳��Ă��邾���Ǒ��v����ˁB
���P�P���Q�P����
�Q�O���A�Q�P���Ɠ��H��剪�R�L�����p�X�ŊJ�Â��ꂽMake Tokyo meeting 6 �ɁA�u���{�ŃT�o�Q�I�v�̃����o�[�Ƃ��ĎQ�����Ă��܂����B�@�T�o�Q�̕��́A�Ȃ�Ƃ��ł����グ���V�O�}�őł��܂���܂����B�@�^�b�p�ō�����e�q��1000�����炢����̂ʼn����Ȃ��ł��܂���ĂȂ��Ȃ��u���ł��B
�������낢�날��܂����B
�Ə��̃A�i���O�X�e�B�b�N��̉����{�^���X�C�b�`���g���K�[�ɂ��Ă������߁A�Ə����Ă��łƂ��ɓ����Ă��܂��Ƃ������Ƃ����o�B�@2���ڂɌ����ăg���K�[�{�^����ύX���܂����B�@���̍ہA������������������悤�ɏC�������肿�傱���傱�ƕύX�������ē���ڂɓ����B
�Ƃ��낪�A�ύX�Ɏ��s�����炵���A�g���K�[�������Ȃ��I�@����ڂ̍ŏ��̎����͓����I��Ԃł����B�@�I�T������ɂڂ��ڂ��ɂ���Ă��܂����B
���̌�A�g���K�[�͏C�������̂����A�o�b�e���[�����������A�R���g���[���̓d�r����Ă��܂��Ƃ����܂��܂Ɩ�肪�����ē���ڂ͂�����Ə����s�ǁB
�Ō�ɃI�T������̋@�̂��ڂ��ڂ��ɂ��ďI���ł������烈�V�Ƃ��邩�B(^�B^)
�S�̓I�ɂ͖����J���������M�����肵�ĕs���ŁA�J�������E�ł̎������v���悤�ɂł��܂���ł����B�@�J�������E�����{�ŃT�o�Q�̑�햡�Ȃ��ǂȂ��B�@����͂Ȃ�Ƃ����Ȃ��Ɩ������Ȃ���B
�@
MAKE�Ƃ����C�x���g���̎n�߂Č����̂ł����A���̂������y���������ł��B�y���������l�q�͂���Ȋ����B
 �@�@
�@�@
�^�R�݂����ȏ�蕨�͖��O���Ȃ�ɂ������Ȃ��������ǁA�u������ł����H�v���ĕ�������u����Ă݂܂����H�v�ƁB�@���ʂȂ�u�G��Ȃ��ł��������v���ĂƂ��낪�A�悹�Ă��ꂿ�Ⴄ�Ƃ��낪�����ł��ˁB
�E�̉摜�́A�D�w�̌��B�@�����⋹���c���ŁA�Ԃ���������R�����肷��l�q���̌��ł��܂��B�@��q�蒠�܂ł�������Ⴂ�܂����B�@�����ƎY�@�ŕ��ʂɑ̌��ł���Ƃ��B�ȁ[�B
�����5���Ƃ������ƂȂ̂ł܂��s�������ł��ˁB
�@
�����A�V�O�}�̏璷�ߐ���͂܂����r���[�Ȃ܂܂����ǁA���́A���i���͂��Ă���̂ɂق�����ςȂ��ɂȂ��Ă���V�^�����_�̑g�ݗ��Ă���낤�B
���P�P���Q�R����
�O��̓����̓��t���ԈႦ�Ă����̂ł������蒼���Ă����܂����B
MAKE���I������̂ő��������_�ɐ�ւ��B
�A�~�G����Ƃ��Ő�o���Ă�������A���~���i���܂��đg�ݗ��ĂāB�@�����_�E�}�[�L�����[����T�[�{�͂������̂ł����}�[�L�����[�r�͂��q����Ȃ낤�Ȃ��B�@���������Ȃ����B
�@
�v���Ԃ�ɐv�`�����{����������A���������l�W���o�J�ɂ��Ă��܂�����A�Ⴆ�Ȃ����Ƃ�����ł����������܂őg�݂�����܂����B�@�F�X�v�f�������Ă��̗ǂ�����\���ɂ����̂ł����A�ڍׂ͂܂��i�]�ł��B

���T�A���K��ɍs���Ƃ��āA���̍�肩�������_�������Ă������A�V�O�}�������Ă������A�����ȁB�@�����_���Ɗm���ɐÓW���ɂȂ�ˁB
���T�́A��������H��֏o���Ŕ��荞�݂̂��ߑł��~�߁B���̍�ƍĊJ��27���ɂȂ��Ă��܂��B��������ł��B
���P�P���Q�W����
�Q�V���͗��K��A�����ŊJ�Âł��B�@�����͂���ς肿����Ɖ������S�O����Ƃ���Ȃ�ł����A����͉ו����܂Ƃ߂�̂�����Ȃ̂ŎԂōs�����Ƃɂ��܂����B�@�Ԃ��ƋA��Ɉ��߂Ȃ���������Ă����ǁB
�ł��A�ԂȂ̂ʼnו��͓K���ɑ��˂ăg�����N�ɕ��荞�ނ����B�@�����_���V�O�}�������Ă������Ƃ��ł��܂��B
����̗��K���TDU�̊w����������������Q�����Ă��ē��₩�Ƃ����Γ��₩�ł���(^_^;)�@�ŁA�ł��グ�͐ΐ삳��̓���݂̏Ă������ցB�@�������������ł��B
�ŁA���ς��ܕv�Ȃ������ō~�낵�Ĉ�H����������܂����B�@�r����z���铹���Q�炢�ԈႦ���������A�i�r���a�J�̂ǐ^��I�т₪���Đ^�钆�Ƃ����̂ɏa�Ɋ������܂�Ă��܂����B
�a�������Đ��c�J�ʂ�𑖂��Ă����Ƃ��������N����܂����B�@�M���҂��Ŏ~�܂��Ă���ƁA�S�[�[�[���I�I�@�ƌ�납��Ռ���(�[�[;)�@����U������ƃ^�N�V�[���Ǔ˂��ė��Ă��܂����B
�^�N�V�[�̑O���s���ӂł��B�@���x���o�ĂȂ������̂łƂ肠��������炵�����̂͂Ȃ��A�Ԃ̌�둤���������ōς݂܂����B�@����܂�ԏ��Ȃ��̂ɋv���Ԃ�ɉ^�]�����炱�ꂾ����Ȃ��@orz�B�B�B�@���T�͒������Ԃ��g���\�肪�������̂ő�Ԃ��p�ӂ��Ă����Ȃ��ƁB�B�B
�@
�̒��������Ȃ邱�Ƃ��Ȃ������̂ŁA�����͈�������_�̑g�ݗ��āB�@�Ƃ����������ȏ�̓T�[�{�ݒ�v���O�����̉��ǂ�����Ă܂����B�@�����_���T�[�{�Ƀg���N�����ė�������Ƃ��낭�炢�͐i���ǁA�g���������p�̃z�[���|�W�V�����p�������ł��Ȃ��̂ʼn摜�͂Ȃ��B
����̒Ǔ˂̂������A����猨�ɂ����ďd���A�A�A����A��������l�߂č�Ƃ��������Ō����Â��Ă邾���H�@�����̒��̗l�q���݂ĕa�@�ɍs���Ƃ������Ǝv���܂��B
�����B�B�B�B(�[�[;)
���P�P���Q�X����
�Ǔ˂���Q�S���Ԉȏ�o���āA��̉E�����d��������������A�E�r��Ⴢ���������肵�Ă����̂ŔO�̂��ߕa�@�ցB
��Ћߏ��ɂ��鐮�`�O�ȁB�@�F�l�̂�������̈�҂ł��B�@���Ⴀ�����g�Q�����܂��傤���Ă��ƂŎB������ł����ǁA�����g�Q�����ŁA�u�����˂��`�@�A�n�n�n�n�v
��҂������Ⴄ���炢�����炵���B(^_^;)�@
�f�f�̌��ʂ͌z�łɂُ͈킪�Ȃ��ƁA�܂����������A���̊Ԋu�����������Ă�낵�������ł��B�@�Ռ������̂͊ԈႢ�Ȃ��̂ň�T�Ԃ͗l�q���݂Ȃ��Ƃ�����Ƃ̂��Ƃł����B
�@
�Ԃ̕����ی����Ǝԉ��ł���肵�Ă�����ĎԂ͈������ɗ��Ă��炢�A��Ԃ�u���čs���Ă��炢�܂����B
���̎ԉ��i�g���^�̃f�B�[���[�j�e�Ȃ��ǁA���̂ɂ��������Ƃ�A�������Ƃ����A�u����̓^�N�V�[�ł������`�A�^�N�V�[�͖ʓ|�ɂȂ�P�[�X�����邩��C�����ĉ������I�v�Ɩ��ɕs����������B�@�e����Ȃ�ł����ǂˁB
�����ċA���Ă�����������̎Ԃ������ƍ��肷��ƁA�v���̂ق������[���A�S���̉\�����o�Ă����ƕ���܂����B
�u�S���ɂȂ��Ă��Ȃ�Ƃ����̋��z�łł������C�����܂��I�I�v
�������͒�~���Ă���Ƃ���ɓ˂����܂ꂽ���S�Ȕ�Q�҂Ȃ̂Ŋ��S�͓��R���Ǝv���Ă����Ƃ���ɂ��̌��t�B�@��C�ɃE�c�ɂȂ��Ă��܂����Borz�B�B�B
�e����Ȃ낤���ǁA���̏ꍇ�ǂ��Ȃ낤�Ȃ��`�@�����������Ԃ��͂����肵�Ă��猾�����Ƃ̂悤�ȁB�@����ׂ�߂�����ˁ[�́H
�@
�f�C���[�|�[�^���̓���B�@�c������Ƃ��ł���ƌ��܂����B
�V�O�}�����������ʼnf���Ă܂��˂��`�B�@���L�n���ł���ė�����Ƃ����C�C�I�@�V�O�}�������Ƃ��낪�f���ĂȂ��̂��c�O���B

��������A���̃V�O�}�B�@�I�T������Ɂu�B�B�B�B�B�����������ł��ˁB�v�@���Č���ꂽ��ȁB�@�Ȃ�Ƃ����˂B
���P�Q���T����
�ԉ�����A��������A����̕ی��ŎԂ̏C�����ł��邱�Ƃ��m�肵�������ł��B�i�S���ɂ͂Ȃ炸�ɍςj�@�悩�����悩����(^.^)�@���Ƃ͂߂�ǂ��������ނ�p�ӂ���Έꌏ�����̂͂��B
�Ǔ˂����T�Ԃقnjo���āA��ɂ͑Ŗo�I�Ȓɂ݂��o�Ă��āA1���ԂقNJ���̉��ŗ������ꂽ�����ň��������ׁi���Ǝv���j�ŏo��P����ɋ����܂��B�@������҂̊��߂������āA�����������Ƃ��x�@�ɓ`����ƁA�l�g���̂Ƃ��Ĉ����̂Œ�������邽�߂ɐ��c�J�x�@���܂ŗ����ƁB
�܂��d�����Ȃ��̂Őf�f���������đ�ԂŌx�@���܂ōs���܂����B�@�s���A��̎��Ԃ���1���ԂȂ̂ɁA���n�؍ݎ��Ԃ�10���قǁB�@�u���Q�҂ɏ�����^����ׂ����Ǝv���܂����H�v�Ȃ�Ď��������Ă��܂����B�@���̂�����͌x�@�ɂ��C���������܂��B
�@
�@�̉����������ȁA���ׂЂ������ȁH�Ǝv�����̂͌��j�����������Ηj�����������B�@���傶��ɂЂǂ��Ȃ�A���j���͊P���@�����\�ȏ�ԂɂȂ��Ă��܂��܂������A�@���j���͏��K�͂Ȃ��玩���������̖Y�N��B�@�������\������Ă邵�A�N���Ɉ����p�����Ƃ��ł��Ȃ��̂ŕ��ׂ������Ă̌��s�ł��B
������Ă�����Ă����҂ŁA�u3���Ԃ��炢�P�ƕ@�����Ƃ߂Ă��������I�v���ė���A�ł��������˂�����܂����B�@���ꂪ�A���ǂ�����������Ďh����Ȃ��B�@����҂���u����H���߂�B�v�Ƃ������āA�j���h�����܂܂��������������ǂ�{����3�x�ڂ��炢�̃g���C�ł���ƌ��ׂ�߂܂����B�@(ToT)�@�����Ƃ����炭�ɂ������ł��B
�@
�����āA���ˑS�R�����Ȃ��B�@�M���o�Ă����݂�����2����̓r���ŋA�点�Ă��炢�܂����B�@(�[�[;)
�M�͈�ӐQ���牺����܂����B�悩�����`�B
���A���{�b�g�J�������܂��܂���Ă܂��B�V�^�����_�̎��_�����쐬���Ď��_���f���\�z�B�@����͒n���ł߂�ǂ�������ƂȂ�ł��B
���P�Q���P�Q����
����͌ߑO���̓��{�ŃT�o�Q�A��̓��{�b�g�Y�N��B
�Y�N��͂܂�����̍H�|�i�₤�����[�̍H�|�i�������Ă�����Ċ�������B�@���A���ƃr�X�R����ƃ~�c�I����̌|�p�i(^_^;)���B�@�F�X�摜�͎B�点�Ă���������ǂ��낢�낢��ƍ����x�����肻���Ȃ̂ō����T���܂��B(~o~)
�@
�ߑO���̃��{�ŃT�o�Q�ł́A�s�R�ȓ��삪�����B�@�����o�����r�[�┭�C�����r�[�ɔ�e�Z���T�[������������A�A�d���Ď��̃|�[�g�Ɣ�e�Z���T�[���ԈႦ����N���肻�������ǁA����ȃ`�����{�͂��ĂȂ������悤�Ɏv�����B�B�@WLAN�ŃJ�������g���Ă�������R���g���[���̐M���ɂȂ�肪�������̂��H�H�H
�Ƃł͂Ȃ��Ȃ������ł��Ȃ����A�݂�ȏW�܂��Ă��鎞�Ƀf�o�b�O��ƂȂ���ł��Ȃ����A�g���u���V���[�e�B���O�����ɂ����ł��ˁB
�@
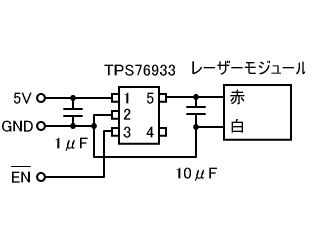
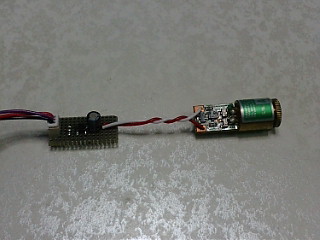
����܂ł̑҂����ԂŏH�t�����Ԃ�Ԃ�Ƃ��Ă����̂ł����A�r���_�J�搶�ɐ����������܂����B���̍ۂ̎���A�u�݂Ȃ��[�U�[�T�C�g�͂ǂ����Ă��ł����H�v���Ă��ƂȂ̂ŃV�O�}�p�ɗp�ӂ������[�U�[�T�C�g�ɂ��ď����Ă����܂��B
���[�U�[���W���[�����H���d�q�Ŕ��������[�U�[�������W���[���ł��B�@����̓d���d����3V�BCoron�����3.3V�̐�����������o�Ă͂���̂ł����ACoron�ɒ��ڂȂ��̂��Ȃ�ƂȂ��i�댯�ȓ��������āj���₾�����̂łTV�Ŏg����悤�Ƀ��M�����[�^�����܂��܂����B���Ȃ݂ɃV�O�}�ɐς�ł���DCDC�R���o�[�^�͏o�͂�6V�ɂ��Ă����6V��3.3V���Ă��ƂɂȂ�܂��B���̃��M�����[�^�ɃC�l�[�u���M�����������̂ŁA�R���g���[����ONOFF�ł���悤�ɂ��Ă��܂��B���傤�ǂ悩�����B�@ONOFF�R���g���[����K�v�Ƃ��Ȃ��ꍇ��3�ԃs����GND�ɐڑ�������[�U�[�͌�����ςȂ��ł��B
��H�͊ȒP�Ȃ��Ǒf�q�Љ���܂߂ā��ɁB
 �@�@
�@�@
���M�����[�^TPS76933��RS�R���|�[�l���g�ł������܂Ƃ߂Ĕ����������u�����i�ł��B1��40�~������5����̔��B�@�����������邩�炱�ꂾ�������ƈ����Ȃ��ł����ǂˁB�@���Ȃ݂ɕ\�ʎ������i�ł��B
�@
�V�^�����_�̋t�L�l���́A���i�K�͊��������炵���B�@����͏��ド���_���͊ȒP�����A���̎p���⑫���p�����ݒ�ł���ߍ\���Ȃ̂ŏ��ド���_���ɕ��G�Ȋ��ɂȂ�̂����A���������Ȃ瓷�̎p���������p�����v��Ȃ��̂ł��̕ӂ������ȈՃo�[�W�����B
�t�L�l�̌���F�X����Ă��āA����ς�R�}���h���C���Ƀ��C���G�f�B�^���K�v�����Ă��ƂŁA�q�X�g���[�ɑ������C���G�f�B�^�̎���������Ă���܂����B�@�J�[�\����߂��ēr����ҏW�ł���悤�ɂ���B�@�ӊO�Ƃ߂�ǂ��ȁB�@�����̓��C���r����BS�ɂ�镶���폜�܂ŃT�|�[�g�B�@���ƁADEL�̃T�|�[�g�ƁA�����̃C���T�[�g���͂̃T�|�[�g�B�@�߂�ǂ��������ǁA���������͓̂����Αf���ɓ����̂ŒP���Ɋy�����B
���P�Q���P�R����
10���̏I��育��X�}�[�g�t�H�����~�����Ȃ�A�h�R������\�t�g�o���N�ɕς��ăA�C�t�H���������o�����̂ł����A���킳�Ɉ�킸�d�b���ɂ悭��܂��B�@�ꂽ���ƁA�����Ȃ���܂����Q�����̂ł����i�\����肾���ǁj�A�@�Ȃ���Ȃ��炵���B
�u�炵���v�Ƃ����̂́A���̂Ƃ���悲��̒Ǔˎ��̂̊W�ŕی���Ђ��炩�����Ă���d�b�������āA�܂�Ԃ��d�b���ēd�b����̂��V���N�Ȃ̂ŁA�����炩�炩�������Ă���̂�҂킯�ł��B�@�҂ĂǕ�点�ǂ������Ă��Ȃ�����ق��Ă�������A���̂܂ɂ����M�����������Ăė���d�Ƀ��b�Z�[�W���c���Ă�B�@����ɕ����ƁA���������Ă��u�ڑ��ł��܂���v�Ƃ��������b�Z�[�W�������炵���A�d���Ȃ�����ԓd�b�ɓ����炵���B
����Ȃ��Ƃ����x������̂ł����ƃ��_���낤�Ƃ͎v�����\�t�g�o���N�V���b�v�ɋ��������ɍs���܂����B
�Ή������X���́A�J����ԁu�ł��邱�ƂȂ���ł��B�v�u�n�[�h�̓A�b�v���X�g�A�ŁB�B�v�ƃ}�j���A���Ή��ł��B�@�����吨�K����ł��傤�˂��B�@�ł��A���A�q�̋����̂��d���Ȃ��炿���Ƙb����B��́A���������猩�Ă��炱�����̌������ƃ�����������ĂȂ�����Ȃ��B�@�Ƃ����ƁA�ł̓������܂��B�@�Ƃ�������ł��B
���������ƕ�����������̂ŁA�X���͂ȂA�ŋ߂̃l�b�g���[�N��Q�̎��Ԃ������肵�Ă���������Ă��܂����B�@�Ō�ɂƂ���ŁA���̗���ԓd�b���ĕ����͖̂����Ȃ�ł��傤�ˁH�ƕ����ƁA�@�܂��₢���킹�d�b�������Ē��ׂČ��ʁA�@�L���������ł��B�@(�[�[;)�@������ׂȂ��ł��L�������Ă��Ƃ��炢�X���͒m���Ă��Ƃ͎v���̂ł����B�B(^_^;)
�������Ă����d�b���ƃ\�t�g�o���N�͂�������Ȃ�����A�K���ȂƂ���Őؒf���āA���������ƃ\�t�g�o���N�̂������B�@���肪����ԓd�b�ɓ��ꂽ��A���������\�t�g�o���N�̂������B����ȃr�W�l�X���f���ŃA�C�t�H���ł��������Ђ˂�o�����Ƃ��Ă��Ȃ����Ɗ����肽���Ȃ�܂����B
���Ȃ݂ɗ���d��������L�����Ă̂̓J�^���O�ɂ͂����Ə����Ă���܂����B�@�����[���ł����ǁB
�A�b�v���͑O���炠��܂�D���Ȋ�Ƃ���Ȃ��ăA�C�t�H�������Ƃ��������Ԃ�����܂����B�@�\�t�g�o���N�͂���قLj�����ۂ͂Ȃ��������ǃf���ɑ����ă}�C�u���b�N���X�g�ɍڂ���������Ȃ��B�@���ꂩ��ł��邾���\�t�g�o���N�ɂ͂�����Ȃ��悤�ɋC�����Čg�т��g��Ȃ��ƁB(^_^;)
�@
�r�̋t�L�l�蔲���ł��쐬�B�@�E�r�̂݁B�@�E�r�̊����g���č��r���v�Z����̂����A�O�̃����_�Ƙr�̍\���������Ԃ�ƈႤ�̂ł����̕�����������˂Ȃ�Ȃ����B�@�r�̐���ɂ��Ă͂܂��܂��Y�ݒ��B�@���R�r�s����H�v���Ă��܂�������@���Ȃ����̂��B�@���p���܂ōl����Ɨ]��ɂ��ۑ肪�����ċC�������Ȃ��Ă��܂��B�@�r�̋t�L�l������������������s�p�^�[�������͓����͂��B�@�����͂��Ȃ��ǁA�����̂��Ȃ��`�B
���C���G�f�B�^�͂قڊ����B�@�u�قځv�Ƃ����̂́A���ʂɎg�����ɂ͖��Ȃ������Ȃ��ǁA���\�ȕҏW����Ƃ��������Ȃ邱�Ƃ����邽�߁B�@���̂������������Ȃ�p�^�[�����킩������f�o�b�O���悤�B
���P�Q���P�S����
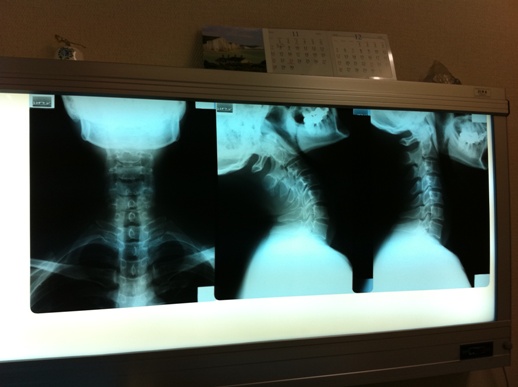
�ŋ߁A�Ŋ��w�̍\���ɎԈ֎q�p�̃X���[�v���ł��܂����B

�G���x�[�^�͂܂��ł��B�@���ł���̂��҂��������ł��B
���̃X���[�v�B�@�X�Ε����͐Ԃ��Ȃ��Ă��ēr���̕��R�ȕ����ƐF������Ă��܂��B�@��������ď����V���b�N���܂����B
�l�Ԃ����p����X���[�v�ł����A�X�Ε����ƕ��n�����ŐF�������Ă���̂ł��B�X���ɂ₩�Ȃ����A�Ԉ֎q�ŗ\�������ɌX�ɓ˓�����̂͊댯������Ȃ̂��Ǝv���̂ł����A�l�ԗp�̐ݔ��ł����̂悤�Ȕz�����K�v�Ȃ̂ł��B
���������������Ƃ����ƁA���{�����̗\�I�̃X���[�v�ł��B�@����ƕ��n�Ɖ����ŐF�������Ă����A�J�����ŌX�Γ˓��ƌX�ΏI�����킩���Ă���ɍ��킹�����[�V����������Ƃ��������Ƃ��\�ɂȂ�܂��B�@�F�����ł���킯�ł��Ȃ��ł���(^_^;)
�����������z��������Ώo�ꃍ�{�b�g���ς���Ă����Ȃ����Ǝv���̂ł����B
�@
�����_�A�����o�����̂ł����A�����ς�����Ȃ��ł��ˁB�@�ǂ����悤�B�B(�[�[;)
���P�Q���P�W����
�P�U���B�@��Ђ̖Y�N������̂ł����A�I�d�ԍۂɂQ������U�ɂȂ��ĉw�Ɍ������Ă���܂����B�@�w�O�̉��f������n���Ă��鎞�̂��Ƃł��B���f�����̃h�^�ŁA�O���痈���j�����s�ӂɕ������Ă��܂����B
�悭����Ɠ������̕ʃO���[�v�̃��c�B�@�u�߂܂��܂����I���������܂����`�B�@�ւււցA�������ɍs���܂��傤�B�v�@(�[�[;)�@�@����A�ؗj�������A�I�d�ԍۂ����B�B�@�@�Ȃ�ƌ����Ă������Ă���܂���B�@����������߂ă^�N�V�[�ŋA�邩�A���܂ň��ނ�(^_^;)�B�B�B
�u���႟�A�킩������B�ǂ��A��Ă���B�@�����Ƃ��Ȃ낤�Ȃ��B�v�@�Ƃ������Ȃ���A�����ꂽ�܂܂ǂ����̂��X�ɉ^��Ă����܂����B
�w�̉w�O�ɍ����|�������Ƃ���ŁA�X�i�b�N�̓��������܂��ʃO���[�v�̕�������яo���Ă��āB�@�u���������B�@�������̓X�ɍs�����I�v�@�ƌ����āA�����Ɏ��t���Ă������c�������������A�X�i�b�N�ɘA��čs���܂����B
�S���������ꂽ�̂ŁA�������Ƃ��葖���ē����܂����B�@(^_^;)�@�@�I�d�Ԃɍ����Ă悩�����`�A�@�|�������`�B�@�W�����V�b�N�p�[�N�̃��X�g�V�[���Ń��F���L���v�g���ɏP����Ԉꔯ�ŁA���v�g����T���b�N�X�ɐH�ׂ���V�[�����v���o���܂����B�@�@�@�ł��A���т�قǏЋ����������Ƃ��������瑖�����̂͌������Ȃ� orz
�@
�����Ȃ������_�B�@�������}�V�ɂ͂Ȃ��Ă����̂����ǁA�܂��܂��ł��B�@����ς胊���N�r�͂悩�����̂��ȁA�Ǝv���Ă݂��̂����ǁA���ɂ�����Ԃ̂ł���͈Ⴄ�悤�ȁB�Ȃ�ƂȂ��Ȃ̂����ǁA�d�S�ʒu�ɂ���Čv�Z���l���Ȃ��Ƃ����Ȃ��悤�ȋC�����Ă��܂����B�@��̓I�ɂ͏d�S�����{�b�g�����ӂ�ɂ���ꍇ�A�������[�����g���傫���̂ʼn��̏����̗͂ʼn�]�^�����N�����₷���B�@���[�����g�n�̌v�Z�́A�v�Z�l�̉e�������Ȃ��Ɣ��f���ďȗ����Ă���̂����ǁA���ꂪ�悭�Ȃ���������Ȃ��B�@�e���_�̊������[�����g�ׂ�͖̂ʓ|���Ȃ��B�d�S�����炷�w�͂����������悢���H
���ƁA��͂胊���N�r���͍������Ⴂ�̂Ō��ɂ����₷���B�@������Ƃ���͍���̍\�����Ƃ����ړI�ɂ��֗^����̂ł܂��C�ɂ��Ȃ��ł悢���ƁB
�@
����Ǔ˂���ĉ�ꂽ�Ԃ��������Ƃ����̂Ŏ��ɍs���ė��܂����B�@����ς莩���̎Ԃ��^�]���₷���ł��ˁB�@���������Ǔˎ��̎��������S�����ł��B
���P�Q���P�X����
����ƐV�^�����_�̑��̋t�L�l�����������܂����B�@�����Ƃ����Ă����̎p���⑫���p���̓T�|�[�g���Ă��܂��B�@�T�|�[�g�����̂͏璷�\���߂̏璷�g�ݍ��킹�w��ł��B
�V�^�����_�͕G�߂������̂ŁA���鑫�p���ɑ��Ċߊp�x��́i�w��́j�����̑g�ݍ��킹������܂��B�@���̑g�ݍ��킹��1���̃p�����[�^�Ŏw��ł���悤�ɂ����t�L�l���ł��B




�G�߂������A���ꂼ��t�ɂ��Ȃ���̂ŁA�ȒP�Ɍ����Ă�����4�̑g�ݍ��킹������܂��B�@����ɂ͂��ꂼ��̒��Ԃɂ������̑g�ݍ��킹������܂��B
�ǂ�����Ďg�����́A���ꂩ��ł����B(~o~)
�@
�������肱�����Ƃ���ɓS�A���C������A���������ł��Ă��܂��܂����B�i�����_���ˁj�@���̔��q�Ȃ̂��ǂ����킩��Ȃ����Ǎ��r���^���s�S�ɁB�@���r��UART5�ɐڑ����Ă����̂�UART7�ɐ�ւ��Ă��Ƃ��듮���o�����B�@���Ȃ݂�UART6���_���ł����B�@���ׂ��Ƃ���SEMB�͑��v�炵���̂ŁA�����炭��UART5��UART6�̐M�������V���[�g���Ă���̂ł͂Ȃ����ƁB�@SSOP�`�b�v������C����ς��Ȃ��`(�[�[;)
�@
����Ɗ��炵���ł��Ă����炵���A�v���O�����͂Ȃ�̕ύX�����Ă��Ȃ��̂�1���͕�����悤�ɂȂ�܂����B�@���̒��q�ł����������������邩���I�H
���P�Q���Q�P����
�ǂ��������_�������Ȃ��B�@�������������l���Ă݂�B
�@�@�����s���@����������N�_�u���������O����͗����Ă���͓̂��R�Ȃ̂����A����Ȃɒv���I�Ȃ̂��H�@�߂̂����������Ȃ̂��A�t���[���̍���������Ȃ��̂��A�X���[�Đ��Ŋm���߂Ă݂�K�v������B
�A�@�g���N�s���@���[�����̓����N�r�̎��Ɠ����Ȃ̂����A�s�b�`���̓����N�_�u���������O����̓g���N�͏��Ȃ��Ȃ��Ă���B�@���������Ă���ƂȂ�ƂȂ��A���̏o���x��Ă���悤�ȋC������B�@���[�V����������Ȃ�܂��悢�̂����A�v�Z���s���Ƃ�����ƌ������B
�B�@���x�s���@�T�[�{�̒��������������B�@���Ƃ��ƃt�^�o�̃T�[�{�ɔ�ׂ��璼�����ɂ͕s�����������̂����A�����N�_�u���������O��͂��̍\�������̃T�[�{�Œ������̂Ђ��݂�ł����������Ă��܂��s���Ă��Ƃ����\�������邩�B
�܂��A�@�Ȃ̂����A�t���[���̍��������Ȃ�Ε⋭����K�v�����邪�A�߂̍����ɂ��ẮA������t�H���[���邽�߂̏璷�\���̂��肾�����̂ŁA���ꂪ�����Ƃ���Ώ璷�\���̉^�p�̎d���ʼn������Ă����Ȃ���Ȃ�Ȃ����B
�A�����Ȃ�A�g���N�������Ȃ���Ȃ�Ȃ��̂����A���[�����Ȃ�e���V���i�[�݂����Ȃ̂�lj�������@���l������B�@���̓s�b�`���ŁA�_�u���ɂ��邩6003�ɂ��邩���ĂƂ��납�B6003�͔��������ȁB�o��B�B�B
�B�����̏ꍇ����ԓ��B�@�L�����u���[�V�������\�Ȃ玎���������A�܂��͐��x���ǂ�Ȃ��̂Ȃ̂���m��˂Ȃ�Ȃ��B�������Ȃ����Ȃ�Ȃ��ȁB
�@
�������Ă݂�ƁA�v�Z���s�ɑ��ă����N�_�u���Ƃ����̂͂Ȃ��Ȃ��̊��S�̂������̂��ȂƎv���B�@�����N�\���̖��ł��鎩�R�x�̒Ⴓ��ʂ̎�i�ʼn�������̂�������������Ȃ��B�@�����Ƃ��A����̃e�[�}�́u�璷�\���ƃR���v���C�A���X�\�����g�����t�B�[�h�o�b�N�n�̍\�z�v�Ƃ����Ƃ���Ȃ̂ŕʂ̘b�ł͂��邪�B
�t�B�[�h�o�b�N�n�Ƃ����Ă��A�������������Ȃ���t�B�[�h�o�b�N�p�̃f�[�^���擾�ł��Ȃ��킯�ŁA1���������炱����悤�ȏ�ԂŃt�B�[�h�o�b�N�����������̂ł͂Ȃ��B�@�Ȃ�Ƃ����˂B
�@
�ߊp�x�L���v�`���[�ƃX���[�B�e�Ŋm�F�����Ƃ���A�@�̃t���[���̂Ђ��݂Ƃ����̂͂Ȃ������B�@���ƁA�A�̃s�b�`���̃g���N�s�������Ȃ������B���葫���x��Ă���Ƃ������Ƃ͂Ȃ������������B
�����A����I�Ƀ��[�����̃g���N������Ă��Ȃ��B�@�I�[�o�[�V���[�g���Ђǂ��B�@���̕����́A�Ҋ߃��[�������_�u���ɂ���O�̃����_�E�}�[�L�����[�Ɠ����Ȃ̂����A���ׂɂ���l�����Ă����P���Ȃ��l�q�B�@����ς�ǂ������������̂ł��̕ӂ�ɊԈႢ������ł���\���͍����B
���ƁA�ł������Ȃ̂�ZMP�̒����ƃ��[�����g�n�̌v�Z�B�@ZMP�̒����Ƃ����̂́A���͑����̐^��ڕWZMP�ɂ����Ă��邪�A���̓_���ł���悤�ɂ��邱�ƁB�@����̓}�[�L�����[�̎������肽�������̂���������Ƃ߂�ǂ������Ȃ̂Ō�ɂ��Ă������́B�@����Ă݂邩�[�B�@���[�����g�́A���ド���_�̎��Ɉ�x�v���O���������̂ł���������Ă���B�B�@�Ǝv�������A�}�g���N�X�N���X������ď������Ă����̂�C����ɈڐA���˂Ȃ�Ȃ����B�B�B
���Ƃ̓��[�����Ƀe���V���i�[��lj����A�ߕ��ׂɂ�����s��Ȃ��B
���ƁA�B�̑��肪�ł���悤�ɂ��悤���ȁB�@�F�X���Ԃ����肻���ł��B
���P�Q���Q�U����
��������ƊJ�Â��ꂽ���{�����g�g�o���ϐ킵�Ă��܂����B�@����Ƃ��ςɍs�����Ƃ����̂͂Ȃ��Ȃ��������b�ŁA�����Ȃ�y���̂ǂ��炩�ɂ���Ƃ���ł��B�@���N�͋A�Ȃ��Ȃ��̂ŔN���N�n�̋x�݂����{�b�g�J���ɏ[�Ă���Ƃ������ƂŊy�ϓI�ɓy�������ׂĊϐ�Ɏg�����Ƃ��ł��܂����B(^.^)
�����u���{�b�g�v������ł̓o�g�����������̕��������̖ړI�ɂ͍����Ă�̂łȂ��Ȃ������[�����Ԃ��߂������Ă��炢�܂����B
 �@�@�������̃h�J�͂�݁@�{�ԂƂ͈ߑ����Ⴄ
�@�@�������̃h�J�͂�݁@�{�ԂƂ͈ߑ����Ⴄ
 �@�@�h�J�͂�݉�̃V���[�@�̈ꖋ
�@�@�h�J�͂�݉�̃V���[�@�̈ꖋ
 �@���s����ɏo���E�҂����S�@�i�S�́H�S��H�S�l�H�j
�@���s����ɏo���E�҂����S�@�i�S�́H�S��H�S�l�H�j
�@
�����ς�@����Ă����t���X�e�B������ƌ����Ă��炦�邱�Ƃ��ł��܂����B�@�Ԃ����u�d�͕����Ɛi�s�����̕������������Ă���v�i�\���͈Ⴂ�܂������ǁj�ƕ����Ă������ǁA���m�ɂ́u���d�����N�ŋɍ��W�n���������Ă���v�ł͂Ȃ����ƌ��܂����B�@�������āA������������Ă���ƍ\���������ł����B�A�z�ł�(�[�[;)�@���A�ł��ԈႦ�Ă���w�E���肢���܂��B
�����N�̂����Ƃ����c�������N�̕s�ւȂƂ����r���������炵���\���ł����B�@�����������ȍH�쐸�x���v�������̂ŒN�ł��^���ł�����̂���Ȃ��ł��B
�����A�݂Ȃ�����h�������`�x�[�V�����ɕς��ė��N�͑傫�Ȑ��ʂ��o����悤�ɂ���낤�B
�@
�}�C�N���\�t�g��10�N������ŊJ�������i��NHK�Ō����Ă��j�L�l�N�g�B�@Windows�p�h���C�o�[��SDK�����J����Ă�����Ă��ƂȂ̂ŋ���������ꂽ�̂Ŕ����Ă݂܂����B
���ꂷ�������ł��ˁ[�B�@�ߍ\����͂���Ȃ��āA�n�`�ϑ��Ƃ��ɂ��̂܂g�������B�@����ς߂V�O�}�̕s���n���s��A�H�ʂ̃e�N�X�`���[�F���Ȃ����Ȃ��Ă��ς݂����B�@����܂��Ԃ����͉𑜓x�Ⴍ�Ďg���Ȃ��ƌ����Ă����A���̒i�K�Ȃ�Ώ\�����Ǝv���ȁB�@Linux�̃h���C�o�[������݂����Ȃ̂�Linux�Ŏ�Ό��\�ȒP�ɂ����ȃZ���T�[���ɓ��肻���B�������B�@������50cm���߂������͑���Ȃ��炵������V�O�}�̕s���n���s�ɂ͎g���Ȃ������B�@�q���[�}�m�C�h�Ȃ班���傫�߂ɍ���50cm�ȏ�̓N���A�ł��܂��B
�`���g�̒������d���Ȃ��Ǝv���Ȃ���K�`�K�`�������Ă���A����̓A�v�����h���C�o�[�̐���Ń��[�^�[�œ������̂Ŏ�œ��������̂���Ȃ��炵���B������ꂿ��������ȁH(^_^;)
���P�Q���Q�X����
��������x�݂ł��B
����͎d���[�߂ŁA�[��ɏ����Q�����Ă���H�t���ɏo�����܂����B�@��ȖړI�̓}�C�N��SD�J�[�h���~������������Ȃ�ł����ǁA�܂����������Ԃ�Ԃ炵�悤���ƁB
�������I�����RT��烍�{�X�|���ɗ���������̂����ǁART�́u�c�ƒ��v�ɂȂ��Ă����Ǒ�|�����͗l�ւ����킩��Ƃ�����Ă܂����B�@���{�X�|�͐V�N�������܂���ɗ]�O���Ȃ��悤�Ȋ����B�@���N�͋A�Ȃ��Ȃ��̂ŁA�N�����Ƀ��{�X�|�ŕ��܂����Ⴈ�����Ƃ��v���Ă����̂����ǁA���{�X�|�̊J�X�����d���n�߂Ɠ������Ă��ƂŎc�O�ł����Ƃ������ƂŁB
�����́u�ł���̂��I�v�Y�N��Ȃ̂ŗ[������V�h�ցB
����܂ł̎��Ԃ̓r�[�O���{�[�h�ւ�OS�C���X�g�[���ƁA�����_�̍\���C���s��ƁB
�r�[�O���{�[�h�͐V�����ł��Ȃ��Ȃ��ǂ��Ƃ����b�����̂Ńf�W�L�[�Ŕ����܂����B��̃}�C�N��SD�͂���Ɏg������Ŕ������B
�V�����r�[�O���{�[�h�́A
�ECOM�|�[�g��Dsub�X�s���ɂȂ����B�@���@�O�̂̓w�b�_�[�s�����o�Ă邾���ŕϊ��P�[�u�����K�v�������B
�E����LAN�|�[�g���t�����B�@���@�O�̂�USB-Ether�A�_�v�^���K�v�������B
�EUSB�|�[�g���S�|�[�g�ɂȂ����B�@���@�O�̂͂P�|�[�g�����Ȃ������̂�HUB���K�{�������B
�Ăȋ�ŁA��T�C�Y�������傫���Ȃ��������ł����炱�����ՐU�镑���̂��炵���{�[�h�Ɏd�オ���Ă܂��B
�ł��AOS�C���X�g�[������܂łɌ��\�ȏ�ǂ��������̂ŋL�^�̂���ŏ����Ă����܂��B
�r�[�O���{�[�h��Ubuntu���C���X�g�[������̂ɁAUbuntu������PC���K�v�ɂȂ�܂��B�@VMwarePlayer���C���X�g�[�����āA������Ubuntu���C���X�g�[�����܂��B�@VMware��z�肵���f�B�X�N�C���[�W���z�z����Ă���̂����ǁA�o�[�W�������Â��ĂW�DX�DX�ł��B�O���[�h�A�b�v�ł���̂Ń|�`�����{�^������������A���炭���ăL�[�{�[�h����܂��B�@�Ƃ��낪109�L�[�{�[�h���I�����ɖ����B�F�X���ׂ�Generic105key��I�����܂����B�@�����̂������̂��悭�킩���B
SDCARD���g����悤�ɂȂ�͂��Ȃ̂Ɏg���Ȃ��B�@�ǂ����USB���g����悤�ɂ���T�[�r�X���~�܂��Ă��܂��ē����Ȃ��B�@���ׂĂ݂��ATI USB filter driver�Ȃ���̂������Ă��Ďז��ɂȂ��Ă���炵���B�@������A���C���X�g�[������悢�Ƃ������Ƃ炵���B�@�ŁA�A���C���X�g�[������ɂ�ATI Catalyst Install Manager����I�����ăA���C���X�g�[������Ηǂ��炵���̂����A�G���[���N�����Ă��܂��ă_���B�@���ǁA�����̏������蓮�ŃA���C���X�g�[�����܂����B
�����USB�f�o�C�X���g����悤�ɂȂ����B�@���ɁASDCARD�f�o�C�X��Ubuntu��łȂ�Ƃ����f�o�C�X���g���Ă���̂��B�@�i���������UNIX�̒m�������߂̊��Ⴂ�ł��j
�I�[�g�Ń}�E���g����f�o�C�X��/dev/sdb1�炵���B�@������g���ă}�C�N��SD�J�[�h�����������悤�Ƃ�����_�����ƌ�����B�Ȃ�ł��ȁ[�H�H�@�F�X���ׂ� dmesg | tail�@�łǂ̂悤�ɔF������Ă���̂��ׂ�ƁA/dev/sdb�@���[�������A/dev/sdb1�̓X���C�X���}�E���g���邽�߂̃f�o�C�X�������B�f�B�X�N�S�̂� /dev/sdb�@�ł����B
PC-UNIX��386BSD����FreeBSD���炢�܂Ō��\�V��ŕ����Ă������ǁA�������艓�������ĖY��Ă��܂���������Linux�̐��E�͂����ς�킩���B�@���j���F�X�����ĕ��G�ł��B
���A�������B�@�C���X�g�[�����������Q�l�ɂ����̂����ǁA�uparted, fdisk, wget, mkfs.*, mkimage, md5sum, pv, p7zip-full�@���C���X�g�[�����Ă����Ȃ����v�Ə����Ă���B
sudo apt-get install [�A�v����]�@�ŃC���X�g�[�����Ă������ǁAmkimage���C���X�g�[���ł��Ȃ��B�@�����́A�A�v�����́uuboot-mkimage�v�炵���B�@�ƊE�̏펯�̂悤�����ǒm��Ȃ�����(^_^;)
�������낢�̂́Awhich mkimage�@�Ƃ��Ă��Ԏ����Ȃ��A�@apt-get ���Ă��Y��������̂��Ȃ��ƌ�����B�@�ǂ����Ă悢��������Ȃ��̂ŁA�R�}���h���C����mkimage �ƃ^�C�v���Ă݂�ƁA�umkimage�̓C���X�g�[������Ă��܂���B�@uboot-mkimage���C���X�g�[�����Ă��������B�v�Ƃ������b�Z�[�W���o���B�@�e�ɂ���Ȃ����������Ǝ�O�ł��肢�������B
�@
�����_�����o���܂����B�@���Ƃ��ƍ���̍\���͒��n���̏Ռ����z�������Ɍv�Z���s���s����\������邱�Ƃł����B�@�Ռ��z���p�̃T�[�{�Ƃ��đ��G�߂�4013�ɕύX���Ă݂��Ƃ���ƂڂƂڂƕ����悤�ɂȂ�܂����B�@����ϏՌ��z���͑厖�ł��B�@���܂��s�������������Ă悩�����`(^.^)
���̃t���[���ɗ���lj��B�@�v�����������\�肾�����̂����ǁA�Ȃ���������������ĂȂ������B�@���Ă݂�ƍ������S�R�Ⴄ�B�@�t���Ă悩�����B
���̑��A�摜�ł͌����Ȃ����ǁA�Ҋ߃��[�����Ƀe���V���i�[�t���[����lj��B�@�v�`�����{���ĂĎ�Ԏ������ɂ��܂����Ȏd�オ��B

�ł͂��낻����s�̃v���O�����ɒ���B�B�B�@�Ǝv�������ǁA���Ă���t�`�q�s���C�ɂȂ��Ďd���Ȃ��B�@�����Ɏ���o���Ƃ����炭�͍�������͂���Œׂ�邾�낤�B
���͎��Q�Ȃ�����A�A�A�@�Ǝ�����������������������ς�C�ɂȂ��Ďd���Ȃ��̂łt�`�q�s�C���ɒ���B
���x���V�t�^��SSOP�����烋�[�y�ł̍�ƂɂȂ�B�@2�|�[�g��������̂��Ăǂ��l���Ă����������������ς�z�����͂����ł��傤�B�Ǝv���Ă�������`�F�b�N���Ă݂����ǂ��������Ƃ���͌�����Ȃ��B�@���ǂ�IC���������邱�ƂɁB
SSOP���͂����ĕt���ւ���̂�����z����₷��C����ɗ������ނ̂ł͂Ȃ����Ǝv�������ǁA�ӊO�ƊȒP�ɍ�ƏI���B�@�z���͂��ׂė����Ȃ̂ŁA�\��IC�����܂��͂����Ă��܂��t�����ΊȒP�Ƃ���ȒP�B
�͂~�X�������āA�Ȃ��Ȃ������Ȃ��������ǁA�Ƃ��Ƃ��S�|�[�g���삵�n�߂��B�@�@IC�ς��Ă������|�[�g���Ȃ���Ȃ������̂ŁA����ς�IC�͉��Ă��Ȃ��āA�ǂ����̂͂t�����������������݂����B�@�t���ւ��̂ǂ������œ����悤�ɂȂ����炵���B�@�@�؋������Ŕ��f������_���ł��ˁB�@�����ƃI�V���ŐM���m�F���ׂ��ł����B�@���@�O�ɂ��������o�������镶�͂��ȁB(^_^;)
�����AUART�͒��������I�@�Ǝv���đS���g�ݗ��Ăă��{�b�g�������Ă݂�ƍ��x�͖����R���g���[�����s���B�@��������B�B�B�@����͓d�������f�����Ă���ۂ��̂ł������ƏC�����܂����B�@��ꂽ�B�B�B
�@
�������ꂩ��v���O������g�ތ��C�͖��������̂ŁA����̑�����beagle board�̐ݒ�̑��������邱�ƂɁB
������PC���Ńv���O�������R���p�C������N���X�R���p�C�����ƁA�ȒP�ȃv���O������beagle board���ɑ��荞�ނƂ���܂ł���Ă݂�B
Web�Œ��ׂĂ݂�ƁA�Ȃ�����B�@apt-cross �ňˑ��W�����ăC���X�g�[������Ƃ��H�H�@�h�c�{�ɂ͂܂肻���ȗ\���������̂Łu���{�ŃT�o�Q�v���Ԃ̃m�{���T�J����ɕ����Ă݂��B�@�����CodeSourcery�����疳���Ŕz�z����Ă���炵���B�@�����_�E�����[�h���ăC���X�g�[���B
���܂ł��R���\�[���ő��삷��̂��Ȃ�Ȃ̂�telnet�ɐ�ւ��悤�Ƃ���ƁAMarverick�́i�Ƃ�����ubuntu�́A�Ȃ̂��ȁH�jtelnet��ftp�������ĂȂ��B�@���ׂ�ƍŋ߂�ssh�Ń����[�g���O�C���ł���A�Ə����Ă���̂�ssh���g�����ƂɁB�@�����Ɠ����悤��apt-get�ł͂��܂������Ȃ��̂Œ��ׂ�ƂȂF�X�菇������悤�ŁA�R�R�ɒ��J�ɏ����Ă܂����B
Ether��DHCP�ݒ�ɂ��Ă����ƁA�����グ�邽�т�IP���ς���Ă��܂��̂ŁA�Œ�IP�ɐݒ�B�@������ADHCP�ł�IP���ς��Ȃ�������@������낤�ˁA�����ƁB
����ł����PC���烍�O�C�����ăt�@�C����]���ł���悤�ɂȂ�܂����B

�f�B�X�v���C��PC��VMware�ŗ����オ���Ă���Ubuntu�@�L�[�{�[�h�̎�O�̂�beagle board�ŁA��ʂ̉E���̃R���\�[����ssh��beagleboard�Ƀ��O�C�����Ă܂��B�@�Ȃ���VMware��Ubuntu���������ł��B�����s������ł��B
����g���ă��{�b�g�������̂͂܂��܂��悾�Ȃ��`�B
�������ɑ�A���B�@�����̕Еt����甃���������Ă��ă��{�b�g�J���ɂȂ��Ȃ����|����Ȃ��B�@�ł��A������ČҊ߃��[�����̃e���V���i�[�̃e�X�g�B
�K���ɐv�����̂�����ς�A�_�ɂȂ��āA����͈͂����܂�����A����������������B�@�����X�v�����O�̎莝�����Ȃ������̂ŁA����������������Ȃ��傫�߂�O�����O�Ńe�X�g�B
������̓e���V���i�[���g���ĂȂ����̍����Ҋ߃��[����
���e���V���i�[������Ƃ����܂ŕ�����B�@�C�C�l�I
�����d����̕���Ƃ���Ȋ����B�@�@�E�E�E�����Ȃ��ȁB������Ɩ\�ꂿ�Ⴄ�̂���肩�B�B�B
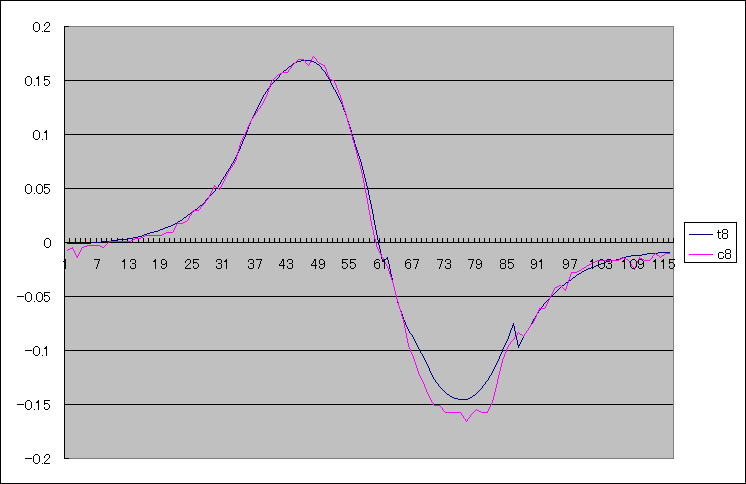
��������A�Ռ��z����ړI�ɐ݂�����̕G�߁B�@���߂��T�X�y���V�����߂ɂ��悤�ƍl���Ă����̂����ǁA
�����ꂪ���G��
�������Ă��ꂪ����s�b�`��
�����X�P�[���ŕ\�����Ă���̂ŁA�����ڂ����̂܂܍��ł��B�@�v�Z���ᑫ��͂قƂ�Ǖ��ׂ��Ȃ���ł����ǁA�Đ����x�̖��ŏd�S�����ꂽ���A���ׂ��������ł��ˁA�����ƁB
�Ƃ����킯�ŁA����s�b�`�߂��T�X�y���V�����߂Ƃ��Đi�߂Ă݂܂��B�@�����̎�����肩���B
�@
���N�͎d������������Ń��{�b�g�J���͂܂܂Ȃ炸�B�@�Ȃ�̐��ʂ��グ���Ȃ��܂܂ɏI����Ă��܂��܂����B�@�d���͏����������������Ă������A���ׂ����Ƃ������������Ă����̂ŁA���N�͂ł��邾���ȑO�̃y�[�X�����߂��A�ł���Ȃ����ȏ�̊J����i�߂����Ǝv���܂��B
���āA���������B�B�B