奐敪擔帍(41)
僩僢僾傊栠傞
奐敪擔帍僀儞僨僢僋僗傊
慜偺儁乕僕傊
師偺儁乕僕傊
仭係寧侾擔仭
儘儃儚儞偐傜憗堦廡娫丅丂偔傑傑偝傫楢懕桪彑偍傔偱偲偆偛偞偄傑偡丅
儘儃儚儞偺搚擔偼僠儑乕妝偟偔偰丄偡偖偵偱傕怴嶌儘儃僢僩嶌傝偨偔側偭偨偺偱偡偑丄寧梛擔偵夛幮偵峴偭偨搑抂丄偦傫側忬嫷偠傖側偄帠傪崪偺悜傑偱巚偄抦傜偝傟丄偡偖偵尰幚儌乕僪偵栠偭偰偟傑偄傑偟偨丅
偲偼偄偊丄巇帠偑廔傢傟偽僾儔僀儀乕僩僞僀儉側偺偱幐偄偐偗偨僥儞僔儑儞傪庢傝栠偟偮偮擭枛偐傜庢傝妡偐偭偰偄偨怴儘儃僢僩峔憿偺嵟廔挷惍傪偟偰偍傝傑偟偨丅丂偦偪傜傕柍帠恾柺弌偟偱偒偦偆側忬懺偵側偭偨偺偱乮偲偄偆偐偲偵偐偔堦搙嶌偭偰傒傛偆忬懺乯儘儃儚儞慜偐傜傗偭偰偄偨偙偲偵栠傞偙偲偵偟傛偆丅
儘儃儚儞捈慜偼媡僉僱偺僨僶僢僌傪偟偰偄偨偺偩偗偳丄偳偆傕扨弮側僶僌偱偼側偔偰晜摦彫悢揰墘嶼傪巊偭偨晹暘偱偺栤戣丠丂傑偨偼儊儌儕乕傾儘働乕僔儑儞栤戣偠傖側偄偐側乕偲巚偊傞愡偑弌偰偒傑偟偨丅丂僄儔乕偑弌偨帪偵偦偙偦偙偺忣曬傪揻偒弌偡傛偆偵偟偨偺偱乮偁丄儊儌儕乕娭學傕揻偒弌偡傛偆偵偟側偄偲傑偢偄偐側乯丂僄儔乕偑弌偨傜専摙偡傞丄偲偄偆懱惂偵偟偰CPG偵栠傞帠偵偟傑偡丅
CPG偺幚憰偵偮偄偰偼儘儃儚儞夛応偺峊偊幒偱僎儘偝傫偵怓乆偲偛堄尒傪偄偨偩偒傑偟偨丅丂偦偆偱偡丅扨偵堷偒崬傒傪婜懸偡傞偩偗側傜摦嶌廃婜傪娤應偟偰偦偺廃婜偱儘儃僢僩傪摦偐偣偽偄偄偩偗偩偐傜CPG側傫偰慻傓昁梫偼偁傝傑偣傫丅丂峏偵偼儔儉僟偼尰嵼寁嶼曕峴偱曕偐偣偰偄傑偡丅丂寁嶼曕峴偵傕怓乆偁傞偺偱偡偑丄儔儉僟偼嫵壢彂乽僸儏乕儅僲僀僪儘儃僢僩乿偺僆僼儔僀儞曕梕惗惉偺寁嶼傪幚憰偟偰偄傑偡丅丂偙傟偼儘儃僢僩偺幙揰峔憿偐傜ZMP傪寁嶼偟丄栚昗偲偡傞ZMP偵側傞傛偆側廳怱婳摴偵側傞傛偆偵岆嵎廂懇寁嶼傪峴偭偰偄傑偡丅
側偺偱丄CPG偱嶌偭偨怳摦傪巊偭偰曕偐偣傞偙偲偑偱偒側偄偺偱偡丅丂偮傑傝丄CPG偲偼墢墦偄曕峴曽朄側傫偱偡偹丅丂偲偄偆偐丄CPG偱摦偐偟偰丄摦偒傪擖椡偡傞偲偄偆曽朄傪庢傞偲僒乕儃偺抶傟偱昁偢埵憡抶傟偑敪惗偟偰摨婜偟側偄傛偆偵巚偄傑偡丅丂恖娫傕摨偠偩偲巚偆偺偩偗偳側偵偐嵶岺偑偁傞傫偱偡偐偹丅
偲偄偆偙偲偱側偤CPG傪慻傒崬傫偱偄傞偐偲尵偆偲丄偦偆偄偆傾僀僥儉偑岲偒側傫偱偡偹丅
崱偺儔儉僟偼埨掕堟偑嫹偡偓偰丄CPG偱曕偐偣傞側偳晄壜擻偵巚傢傟傞偺偱丄傕偆彮偟埨掕堟偑峀偄儘儃僢僩偑弌棃偨傜帋偟偰傒偰傕偄偄偐側丅
仭係寧俁擔仭
弔偺戝棐丅丂戜晽暲傒偺朶晽塉偱夛幮偼揹幵偑巭傑傜側偄偆偪偵婣傝側偝偄偲丅丂寢嬊夛幮傪弌偨偺偼傕偭偲傕塉晽偑嫮偄偲尵傢傟偰偄偨6帪崰丅
傛偭偟乕偑FB偱彂偄偰偨崙搚岎捠徣偺乽X僶儞僪MP儗乕僟乕乿偲偄偆偺傪尒偰傒傞偲丄塉検偵攇偑偁傞偺偑椙偔傢偐傞丅丂晽偼偢偭偲嫮偄偗偳塉偑崀偭偰偄側偄偺側傜側傫偲偐側傞傛偹丅偭偰偙偲偱儗乕僟乕尒偰塉偑崀偭偰偄側偄僄儕傾偵偝偟偐偐偭偨偺傪尒寁傜偭偰夛幮傪旘傃弌偟偰媫偄偱墂傑偱僟僢僔儏両
嶱傪嵎偝偢偵擥傟傞偙偲側偔墂傑偱峴偔偙偲偑偱偒傑偟偨丅丂儔僢僉乕(^丅^)
丂
CPG廃婜偱曕偐偣傞偲偄偆偺傪傗偭偰傒傑偟偨丅丂摨婜傪庢傞僐乕僨傿儞僌偑柺搢偩偭偨偺偱偲傝偁偊偢偼僼儕乕儔儞僯儞僌偟偰偄傞CPG偺廃婜傪曕峴廃婜偵庢傝擖傟偰曕偐偣傞丅丂偦偟偰懌棤僙儞僒乕偺忣曬傪CPG偵擖椡偡傞偲偄偆宍偱傗偭偰傒傑偟偨丅
偙傟側偐側偐柺敀偄丅丂曕偐偣傞偩偗偱彑庤偵曕峴廃婜傪挷惍偟偰曕偒傑偡丅丂愨懳偵僐働側偄偭偰傢偗偠傖側偄偗偳偁傫傑傝埨掕偟偰偄側偄儔儉僟偱傕廫暘偵曕偐偣傜傟傞丅
帠慜専摙偱傢偐偭偰偄偨媡埵憡偱怣崋偑擖椡偝傟偨応崌丄廃婜偑憗傑傝側偑傜摨婜偟偰偄偔傫偩偗偳丄憗偔側偭偰摨婜偟偨傑傑憗偔曕偔傫偱偡偹丅丂尦偺廃婜偵栠傜側偄丅丂傗偭傁傝媡埵憡偱曕偒巒傔傞偺偼僀儅僀僠側偺偱曕峴奐巒偲CPG僞僀儈儞僌偼崌傢偣偨曽偑傛偝偦偆偱偡丅
丂
曕峴偵娭偟偰偼偦傠偦傠摦椡妛傪巊偭偨寁嶼曕峴偭偰偺偼廔傢傝偐側乕偲巚偭偰偄傑偡丅丂帺棩摦嶌傪偝偣偨偲偒偺曕峴惗惉偺偨傔偵偼摦椡妛傪庢傝擖傟偰嵟揔壔傊偺嬤摴傪栚巜偝側偗傟偽廂懇偟側偄偩傠偆偲峫偊偰摦椡妛儀乕僗偺寁嶼傪曌嫮偟偰偄傑偟偨丅丂杮棃側傜懱姶偟偨姶妎偐傜曕峴偑嵟揔壔偝傟傞傋偒側傫偩偗偳偦傫側僙儞僒乕孮偲張棟傪嵟弶偐傜旛偊傞偙偲偑偱偒側偄偺偱暔棟寁嶼偱偦偺戙梡偑偱偒側偄偐偲巚偭偨偺偱偡丅
偦傟偑傑偭偨偔偺娫堘偄偲偄偆傢偗偠傖側偄偺偩偗偳丄埨掕堟偺嫹偝偑僴儞僷偠傖側偄偺偱幚梡揑偠傖側偄偱偡偹丅丂儂價乕梡僒乕儃偠傖惛搙傕偨偐偑偟傟偰偄傞偟丅丂僼傿乕僪僶僢僋惂屼傪擖傟傞偺傕怓乆偲擄偟偄偟丅丂偙傟偐傜偼彮偟幚梡揑側曽岦偲丄帺屓宍惉偺巇慻傒偺曽岦偵僔僼僩偟偰偄偙偆偐偲巚偭偰偄傑偡丅
仭係寧俀俀擔仭
偢偄傇傫偲峏怴偟偰偄側偄偺偱彂偔傎偳偺偙偲偼側偄偺偩偗偳峏怴丅
愭擔丄寑応岞奐偺嵟廔擔偵乽塅拡愴娡儎儅僩2199丂戞堦復乿傪娤偰棃傑偟偨丅丂幚偼偁傫傑傝娤偵峴偔婥偼側偐偭偨傫偩偗偳傒傫側偺昡敾偑偁傑傝偵偄偄偺偱娤偰偍偙偆偐偲丄儎儅僩岲偒偩偟丅丂偱丄夛幮偺傗偭傁傝儎儅僩岲偒側傗偮偑嫃偰丄偦偄偮傪桿偭偰傒傞偲丄傾僞儅偭偐傜僈儞偲乽娤偵峴偔傢偗側偄偠傖側偄偱偡偐両乿偲挻斲掕丅丂側傫側偺偙傟丅丅(>_<)
偱傕偦偙偼堦扷堷偄偰傗傫傢傝榖偟偰傒傞偲丄偁傑傝偵儎儅僩偑岲偒偩偐傜奊傗惡桪偑堘偆偺偑偄傗傜偟偄丅丂偪側傒偵儖僷儞偼嶳揷峃晇僆儞儕乕攈傜偟偄偱偡丅
偦偄偮偑丄奐岥堦斣乽僨僗儔乕憤摑偺惡偼埳晲夒搧側傫偱偟傚偆偹両乿丂(^_^;)丂偦偆偄傗偦偆偩偭偨側乕丄丂偄傗堘偆偲巚偆丅
丂
偦偄偮偲娤偵峴偔偺偼掹傔偰丄愇愳偝傫傗價僗僐偝傫偨偪偲娤偵峴偭偨偺偱偡偑丄側傫偲嶌拞僈儈儔僗惎恖偨偪偼傢偗偺傢偐傜側偄尵梩傪偟傖傋偭偰傞両丂梫傜側偄傫偩傛偦傫側儕傾儕僥傿乕偼両丂偩偄偨偄偵偟偰偦偟偨傜僨僗儔乕憤摑偺乽儎儅僩偺彅孨乿偭偰僙儕僼偼偳偆偡傫偩傛両
6寧偵岞奐偲側傞梊掕偺戞擇復偼攇摦朇傗儚乕僾偑弌偰偔傞傜偟偄丅丂昞尰偑慜嶌偲偼悘暘偲堘偆傒偨偄偩偗偳妝偟傒偩側乕丅丂晜梀戝棨偑傇偭旘偽偝傟傞偺傕偭偨偄側偄側乕丅
丂
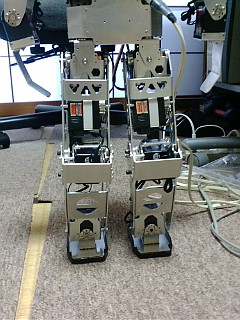
儘儃僢僩偺曽偼怓擣幆僥乕僽儖偺曇廤偑偱偒傞傛偆偵BeagleBoard偺僾儘僌儔儉傪傗偭偰傞偲偙傠偵敪拲偟偰偄偨斅嬥晹昳偑撏偄偰偟傑偭偨傕偺偩偐傜僾儘僌儔儉偦偭偪偺偗偱怴懌峔憿偺壖傝慻傒偟偰傑偟偨丅丂愝寁儈僗傗壛岺儈僗丄偦傟偐傜夵椙偟偨曽偑傛偝偦偆側偲偙傠偑悢揰偁偭偨偺偱偙傟偐傜捛壛敪拲偱偡丅
崱夞偺峔憿偼宍忬揑偵暯斅偵側傞偲偙傠偑懡偄偺偱巒傔偰僕儏儔儖儈儞傪巊偭偰傒傑偟偨丅丂晛捠偺僽儔働僢僩晹暘側偳偼崱傑偱偳偍傝傾儖儈崌嬥側偺偱偡偑丄僸儏乕儅僲僀僪儘儃僢僩傪嶌傝巒傔偨崰偐傜巊偭偰偄偨憤僸僲僉嶌傝偺斅嬥嬋偘婍偑僈僞僈僞偵側偭偰偟傑偄丄側偐側偐嬋偑傝傑偣傫丅丂儀乕僗偑栘側偺偱潥傫偩傝捵傟偨傝偟偪傖偭偰傞傫偱偡偹丅丂怴偟偄嬋偘婍傪嶌傞偺傕戝曄偩偟丄攦偆偺偼傕偭偲戝曄偩偟丄傠傏偲傑傗儘儃僗億偵峴偐側偄偲嬋偘傜傟側偄偺傕僀儎偩偟丄崲偭偨側偀偲丅丂偱傕偲傝偁偊偢崱偡偖嬋偘偨偄偺偱僠儍僉僠儍僉偭偲廋棟偟偰傒偨偲偙傠丄丄丄傑偩傑偩巊偊偦偆丅丂(^_^;)丂丂偙偺傑傑偁偲5擭偔傜偄巊偄偦偆偱偡丅
仭俆寧係擔仭
僑乕儖僨儞僂傿乕僋傕屻敿偵撍擖偱偡丅丂搑拞侾擔弌嬑擔偑偁偭偨偗偳偦傟埲奜偼偢偭偲媥傒丅丂怴懌偺捛壛敪拲暘偼楙廗夛慜偵撏偄偨偺偱偡偖偵慻傒棫偰傑偟偨丅楙廗夛偵偼偙偭偦傝偲帩偭偰峴偭偰偄偨偺偱偡偑丄摦嶌妋擣偵庤娫庢偭偨忋丄廐梩尨偱攦偄暔偟偰偐傜岦偐偭偨楙廗夛偵偼廔傢傝娫嵺偵摓拝丅丂妛惗偱偛偭偨曉偡儚儞僼僃僗僇僼僃偱偙偭偦傝惣偝傫偵偛徯夘偟偨傝偟偰偄傑偟偨丅
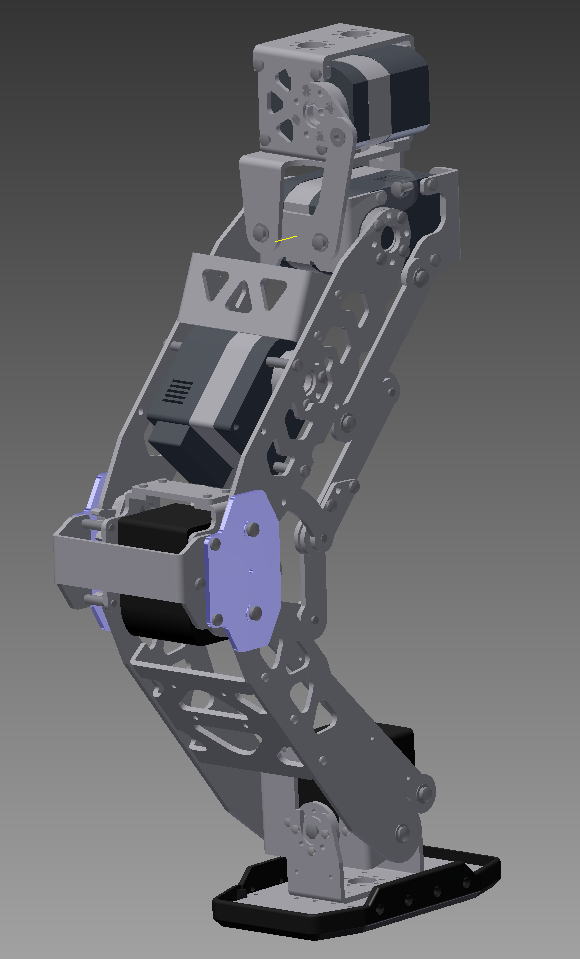
僑乕儖僨儞僂傿乕僋偵擖偭偰偐傜偼偦偺怴懌偱曕偐偣傞傋偔弨旛傪偟偰偄傑偟偨丅丂崱夞偼擇娭愡嬝儕儞僋丅丂棨惐偺摦暔偡傋偰偑旛偊偰偄傞偲偄偆擇娭愡嬝傪儌僠乕僼偵偟偨儕儞僋峔憿偑摿挜偱偡丅丂峏偵偼偆偭偪乕偺僗僗儊偱尰峴偺儔儉僟傪暘夝偣偢偵峔抸偟偨偺偱僒乕儃傪怴挷偟偰偺惢嶌偱偡丅丂乮傑偩壓敿恎偩偗偩偗偳乯丂CPU傕偦傠偦傠SEMB1200A偠傖側偄偺偱摦偐偟偨偄偺偱ICS3.0埲忋偵偟偨偐偭偨偭偰偺傕偁傝傑偡丅
偲偼尵偭偰傕峔憿偺傾儔弌偟傪偣偹偽側傜傫偺偱儔儉僟偵搵嵹偟偰偄傞SEMB1200A傪攓庁偟偰摦偐偟偰傒傞偙偲偵偟傑偟偨丅
働乕僽儖偺娭學偱懌摜傒偩偗(^_^;)丂忋敿恎偑柍偄偺偱慜恑偝偣傞偲夞偭偪傖偭偰傑偲傕偵曕偗傑偣傫丅
儔儉僟偺僾儘僌儔儉傪棳梡偡傟偽偡偖偵摦偐偣傞偲巚偭偰偄偨偺偩偗偳丄傛偔峫偊傞偲ZMP偺寁嶼偵巊偭偰偄傞懡幙揰儌僨儖偐傜偺ZMP寁嶼偼懡娭愡嬝儌僨儖偵偼揔崌偟偰偄側偔偰怓乆嵶岺偑昁梫偱偁傞偙偲偵傗偭偲婥晅偄偨傝偟偰悘暘庤娫庢傝傑偟偨丅丂偙傟偱傕媡僉僱偼挻庤敳偒乮摲懱巔惃偺僒億乕僩側偟乯偱偡丅
摦偐偟偰傒傞偲丄儕儞僋傾乕儉偺崉惈偑懌傝側偄丄庤敳偒偱愝寁偟偨幉偑娚傓乮儀傾儕儞僌偼擖傟偰偁傞偲偼偄偊僱僕傪巊偭偨娙堈幉側偺偱乯丂懡暘旼僩儖僋偑懌傝側偄丂偲偄偭偨栤戣偑偱偰偒傑偟偨丅丂儕儞僋傾乕儉偺崉惈偵偮偄偰偼梊應偟偰偄偨偺偱曗嫮晹昳傪偮偗傜傟傞傛偆偵偟偰偁傝傑偟偨丅忋偺摦夋偼曗嫮偟偨屻偺摦偒偱偡丅
幚偼儔儉僟偺曕峴僾儘僌儔儉偩偲偙偺懌峔憿偺摿挜偑妶偐偣側偄偺偱僪儔僀僽曽朄傪峫偊偹偽側傝傑偣傫丅丂峔憿傕傕偆彮偟尒捈偟偑昁梫偱偡丅
丂
偦傟傛傝丄偣偭偐偔僂僢僠乕偺僗僗儊偱尰儔儉僟傪偽傜偝偢偵嶌偭偨偺偵丄偙偺僥僗僩僾儘僌儔儉傪彂偒崬傫偩帪偵偄傑傑偱堢偰偰偒偨挷惍忣曬傪娫堘偭偰徚偟偰偟傑偭偨丂(>_<)丂僟儊乕僕偱偐偄(T_T)
仭俈寧侾擔仭
偪傚乕媣偟傇傝偵擔帍峏怴偱偡丅
傗偭偲嶌偭偨擇娭愡嬝宆懌峔憿偑僀儅僀僠偩偭偨偺偱夵椙偟偰偄傑偟偨丅丂慜屻曽岦儕儞僋乮懌庱僺僢僠偺嶰娭愡嬝峔憿乯傪庢傝崬傫偱傒傑偟偨丅丂愝寁帪偵庢傝崬傓傋偒偐偳偆偐柪偭偨偺偱偡偑丄偙傟傗傞偲峏偵僼儘僗僥傿偵嬤偔側傞偺偱傑偢偼懌庱僺僢僠偼擇娭愡嬝宆偲偡傞偙偲偱乮偦偺傎偆偑峔憿偑娙扨偩偟乯恑傔偰傒傑偟偨偑摦偐偟偰傒傞偲傗偭傁傝慜屻曽岦偺儕儞僋傕梸偟偄側偀偲偄偆偙偲偱丄柍棟傗傝夵憿偱偡丅
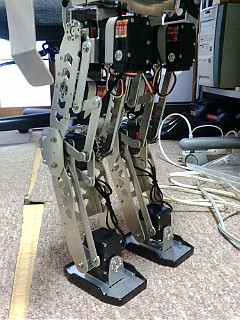
側傫偣柍棟傗傝慻傒崬傫偩偺偱娭愡偺壜摦斖埻偑嫹偄(>_<)丂懡暘曕偗傞偲偼巚偆偺偩偗偳丄丄丂偙偺傑傑偠傖栚巜偟偰偄傞乽惗妶嬻娫偵嫃傞儘儃僢僩乿偲偟偰偼晄廫暘側偺偱傑偢偼摦偐偟偰傒偰偄偄姶偠側傜峏偵夵椙偟傑偡丅
屢娭愡儘乕儖偵傕夵憿傪梊掕偟偰偄傞偺偱傑偩傑偩愭偑挿偄丅丅丅
摦偐偟偰偐傜摦夋傪傾僢僾偟偨偐偭偨偺偩偗偳丄寢壥偑晄挷側傜擔帍偺峏怴偑傑偨悢儢寧柍偔側傞嫲傟偑偁偭偨偺偱惷巭夋偱傾僢僾偟傑偡丅(^_^;)
憗懍媡僉僱傪廋惓偟偰曕偐偣偨偄偲偙偱偡偑丄崱擔偼偙偺偁偲乽儎儅僩2199乿偺戞擇榖傪尒偵峴偔偮傕傝側偺偱崱擔偼摦偐側偄偐側乣丅
仭俈寧俀俀擔仭
傑偨傑偨媣偟傇傝偺峏怴偱偡丅
慜夞偺峏怴偱摦夋傾僢僾偲偐尵偭偰傑偟偨偑丄幚偼摿偵摼傞傕偺偑側偐偭偨偺偱摦夋嶣塭偼枹幚巤丅丂壗傛傝偙偺懌偵偼偙偺懌偵崌偭偨曕梕偑偁傞偼偢側偺偩偑崱偁傞僾儘僌儔儉偠傖偦傟偼娙扨偵弌棃側偄丅丂僥僗僩梡偵儌乕僔儑儞嵞惗偱偒傞儃乕僪帩偭偰偍偙偆偐側丅
慜夞偺夵憿偱偼娭愡壜摦斖埻偑旕忢偵嫹偄偱偡丅幚尡梡偲妱傝愗偭偰傕傛偄偺偩偗偳丄儌僲傪挱傔偰偄傞偲乽偙偙偲偙偙傪偁偀偡傟偽壜摦斖埻偑峀偑傞側偀乿偲巚偭偰偟傑偭偨傜傗傜偢偵偼偄傜傟側偄(^_^;)
偲偄偆傢偗偱屢娭愡偺夵憿偲嫟偵壜摦斖埻偺奼戝愝寁傪傗偭偰偍傝傑偟偨丅
 丂丂丂
丂丂丂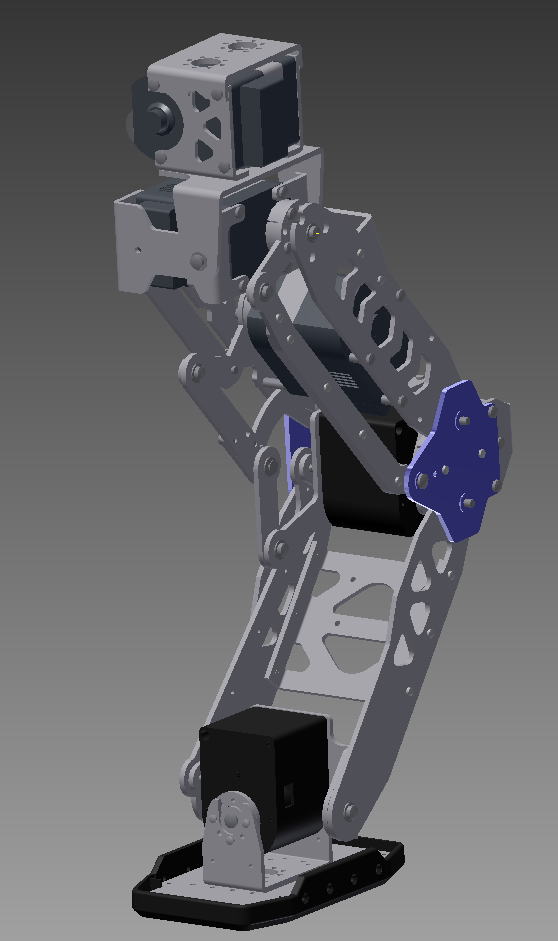
屢娭愡傪旕暲峴儕儞僋偱尭懍丅丂儕儞僋側偺偱媡揱払岠棪偑掅偄偺偱壸廳偵傛傞娭愡偺偨傢傒偺寉尭傪婜懸偟偰偄傑偡丅乮僼儘僗僥傿乕偺儅僱偱偡乯
丂
乽偙偺懌偵揔偟偨曕梕乿偵偮偄偰
偙偺懌偼乽擇娭愡嬝峔憿傪巊偭偨乿懌峔憿偲偄偆傆偆偵彂偄偰偒偨偺偩偗偳丄婡夿揑偵偼Z-Y幉儕儞僋峔憿偵側偭偰偄傑偡丅乮奣偹僼儘僗僥傿乕偲摨偠丂Z幉儕儞僋偺幚尰曽朄偑堎側偭偰偄傑偡乯丂仸変偑壠偱偼慜屻曽岦傪Y幉偲偟偨嵗昗宯傪巊偭偰偄傑偡
崱傑偱偺儔儉僟偺曕梕偼搢棫怳巕偺塣摦曽掱幃傪婎杮偲偟偨ZMP婯斖偺曕梕偱偟偨丅偙傟偼廳怱揰偺崅偝傪堦掕偲偟丄廳怱偵懳偟偰悈暯曽岦偺壛懍搙傪梌偊傞偙偲偱廳椡偲偺崌椡偱栚揑偲偡傞ZMP傪幚尰偡傞偲偄偆傕偺偱偟偨丅
懳偟偰偙偺懌偼Z幉儕儞僋傪帩偭偰偄傞偺偱旼偑偨傢傫偱傕懌庱傗屢娭愡偑捛悘偟偰揮搢偟偯傜偄偺偑棙揰偺堦偮丅丂偱偁傟偽丄愊嬌揑偵廳怱揰偺忋壓摦傪嫋梕偡傞曕梕偱側偗傟偽側傝傑偣傫丅
嬶懱揑偵偼忋壓摦傪偡傞偙偲偱廳椡壛懍搙偵傛傞椡偑庒姳媧廂偝傟傞偨傔丄栚昗偲偡傞ZMP傪幚尰偡傞偨傔偺悈暯曽岦偺壛懍搙偑彫偝偔側傝傑偡丅峏偵偼忋壓摦傪嫋梕偡傞梀媟塣摦傪幚尰偣偹偽側傝傑偣傫丅
幚偺偲偙傠丄偙偺幚尰偺庤抜偑偝偭傁傝傢偐傜側偄偱偡丅(^_^;)丂偲傝偁偊偢偼娙扨側儌乕僔儑儞傪嶌偭偰幚尡偟偰傒傞偟偐側偄偱偡偹丅丂曕偔傑偱傕偆彮偟偐偐傝偦偆偱偡(>_<)
奐敪擔帍傪峏怴偟側偔側偭偰媣偟偄丅丅丂媣偟傇傝偵峏怴丅
峏偵偝傜偵峔憿曄峏傪宱偰丄擇娭愡嬝峔憿傪巊偭偨媟峔憿偼峔憿揑偵偼堦抜棊偟傑偟偨偺偱偦傠偦傠摦偐偟偨偄偲巚偄傑偡丅

崱夞偼寁嶼曕峴偠傖側偔偰儌乕僔儑儞偱摦偐偟偰丄偱偒傟偽乽妛廗乿傪慻傒崬傫偱傒偨偄側偲丅
偲傝偁偊偢Cortex-M3偱摦偐偦偆偲巚偭偨偺偩偗偳丄峫偊傞偲KONDO偺僒乕儃傪晛捠偺儅僀僐儞偱摦偐偟偨偙偲偑側偄丅丂2WUART傪侾WUART偵偟偰偮側偘偽偄偄偲巚偆偺偩偗偳嬤摗壢妛偺儂乕儉儁乕僕偱妋擣丅
偡傞偲丄夞楬恾偲偲傕偵愢柧偑
乽壓婰夞楬恾偼嬤摗壢妛幮惢KCB-1儅僀僐儞儃乕僪偺僔儕傾儖僒乕儃儌乕僞乕傪嬱摦偡傞晹暘偺傒傪彂偒弌偟偨傕偺偱偡丅夞楬恾偺SIO僐僱僋僞偺斣崋偼丄侾斣偑怣崋慄丄俀斣偑揹尮慄丄俁斣偑僌儔儞僪慄偲側偭偰偄傑偡丅暰幮惢儘儃僢僩梡僔儕傾儖僒乕儃儌乕僞乕偼丄揹尮揹埑偼10.8V偱丄敿擇廳僔儕傾儖捠怣偵傛傝摦嶌偟傑偡丅僔儕傾儖捠怣乮怣崋乯慄偼CMOS儗儀儖乮栺3.3V埲忋偱HIGH偲擣幆偝傟傞乯偺晧榑棟偲側偭偰偄傑偡丅乿
晧榑棟偭偰丄1傪L儗儀儖偱昞偡偭偰偙偲偩傛偹丅丂彮側偔偲傕夞楬偼晧榑棟偵側偭偰偄側偄偺偱UART偺嬌惈偑斀揮偱偒傞僞僀僾丠丂偄傗丄妋偐SEMB1200A偲BeagleBoard偺UART傪偮側偄偩偲偒偼榑棟斀揮側傫偐偟偰側偄偟丄傾僀僪儖偼H偩偭偨妎偊偑偁傞丅
怓乆暦偄偰夞偭偨傜乽傾僀僪儖偼High儗儀儖偱晧榑棟乿偲嫵偊偰傕傜偭偨傫偩偗偳丄偡傞偲丄UART偺嬌惈斀揮偠傖側偔偰僨乕僞傪斀揮偟偰憲怣偟偰丄庴怣偟偨僨乕僞傪斀揮偟偰撉傒庢傞偭偰偙偲偐偄丠丂堄枴傢偐傫偹偉側偀丅丂偲偄偆偙偲偱掹傔偰SEMB1200A偑僒乕儃傪摦偐偟偰偄傞偲偙傠傪僆僔儘偱娤嶡偡傞偙偲偵丅

偙傟偼僒乕儃ID=1偵億僕僔儑儞0傪憲怣偟偰偄傞偲偙傠丅丂偊傜偔側傑偭偨怣崋偩側丅丅丅丂傾僀僪儖偼H偱僗僞乕僩價僢僩偼L丄僗僩僢僾價僢僩偼H丂憲偭偰偄傞僐儅儞僪偼81H00H00H偺3僶僀僩側偺偱1傪H偱昞偡惓榑棟偵尒偊傞側偀丂僷儕僥傿偑偮偄偰傞傛偆偩丅10000001B偵0偑偮偄偰偄傞偺偱even僷儕僥傿偱偡丅丂81倛傕00倛傕慜屻偑傢偐傜傫僨乕僞偩偗偳丄LSB偐傜憲偭偰傑偡丅
偮傑傝夞楬揑偵傕僾儘僌儔儉揑偵傕斀揮張棟傪偡傞昁梫偼側偄傜偟偄丅丂偡傞偲嬤摗偺HP偵偁傞晧榑棟偭偰偺偼壗傪巜偟偰偄傞傫偩傠偆偐丠丠丠